
加州大学提出直接 LiDAR-惯性里程计和建图:关注计算效率、操作可靠性和有效性

以下内容来自小六的机器人SLAM学习圈知识星球每日更新内容
点击领取学习资料 → 机器人SLAM学习资料大礼包
#论文# Direct LiDAR-Inertial Odometry and Mapping: Perceptive and Connective SLAM
论文地址:https://arxiv.org/abs/2305.01843
作者单位:加州大学
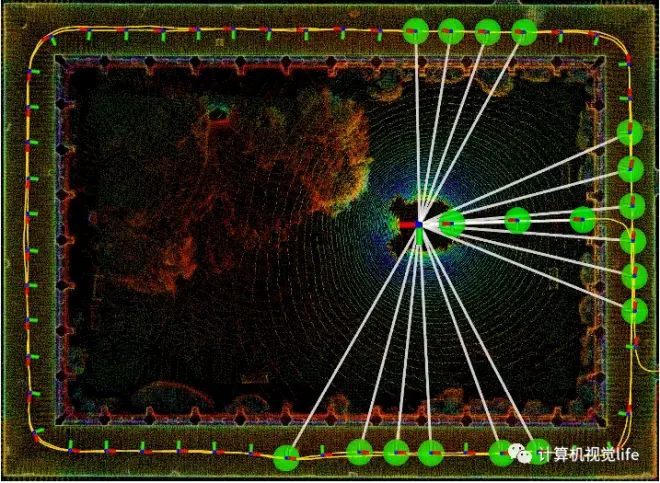
本文介绍了直接激光雷达-惯性SLAM(DLIOM),这是一种鲁棒的SLAM算法,明确关注计算效率、操作可靠性和现实世界的有效性。DLIOM在前端和后端子系统中都包含了几个关键的算法创新,以设计一个具有弹性的激光雷达惯性架构,该架构对环境具有感知能力,并为自主机器人平台产生精确的定位和高保真的3D地图。在深入研究了现代激光雷达SLAM系统及其在不同操作环境中的普遍性后,我们通过主动安全防护来解决几个常见的算法故障点,以在非结构化的现实世界中提供长期的操作可靠性。我们详细介绍了分布在典型LiDAR SLAM中的定位精度和建图的几个重要创新,以全面提高算法的速度、精度和鲁棒性。此外,我们还讨论了在资源受限系统上实现如此复杂的实时状态估计系统时从我们的底层方法中获得的见解,并且我们通过实验表明,与公共基准和自收集数据集上的当前最先进的方法相比,我们的方法的性能有所提高。 这项工作的主要贡献有五个方面,每个方面都针对典型LiDAR SLAM架构中的一个特定模块,以全面提高算法的速度、准确性和鲁棒性: 1、关键帧:一种关键帧的方法,通过全局和与传感器无关的退化度量来检测突然场景变化期间扫描匹配滑动的开始。
2、子图:通过计算帧到地图配准的每个关键帧的相对3D Jaccard索引,生成具有最大覆盖率的显式相关本地子地图的方法。 3、建图:一种通过连接因子和基于关键帧的回环检测来提高局部建图精度和全局回环检测的方法。 4、帧匹配:一种自适应扫描匹配方法,通过新颖的点云稀疏度度量,在大型和小型环境中保持一致的配准。、 5、运动校正:一种新的粗到精技术,用于快速和可并行的点方向运动校正,其中一组具有恒定的加速度和角加速度运动模型的解析方程,用于构建连续时间轨迹。








以上内容来自小六的机器人SLAM学习圈知识星球每日更新内容
