(STM32CubeMx生成HAL库)32最小系统板,按键控制42混合步进电机启停、变向、加减速
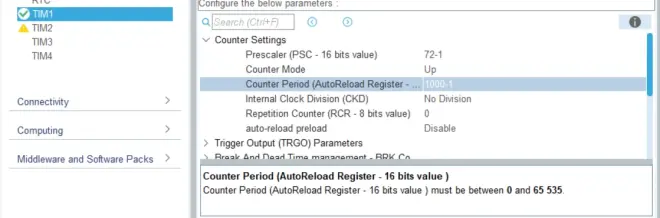
用的定时器1通道1生成pwm脉冲,改变ARR值改变脉冲频率从而实现调速,采用按键中断控制
直接上图


引脚定义:
PA5 EN 使能 PA7 DIR/CW 方向
PA8 PUL/CLK 脉冲
KEY1 PA3 开启3中断
KEY2 PB11 开启10到15中断,10到15还是11到15引脚共用一个中断
KEY3 PA1 开启1中断
KEY4 PA2 开启2中断
GPIO界面:

按键(要设置为中断,exti这个)用的非自锁按键(轻触开关),我用的下降沿触发,这边应该上升沿下降沿都可以,按键按下又弹起来了看个人需求吧,引脚设置为上拉高电平。


EN和DIR引脚,设置为推挽输出(output push pull),引脚设置为低电平,EN低电平对应电机非脱机状态,正常运行;DIR低电平对应电机逆时针旋转状态
科普一下:
推挽输出的最大特点是可以真正能真正的输出高电平和低电平,在两种电平下都具有驱动能力。
常说的与推挽输出相对的就是开漏输出,对于开漏输出和推挽输出的区别最普遍的说法就是开漏输出无法真正输出高电平,即高电平时没有驱动能力,需要借助外部上拉电阻完成对外驱动。
NVIC中断:





就只用了定时器1通道1生成PWM波形

时钟配置:


上代码
主函数:
#include "main.h"
#include "tim.h"
#include "gpio.h"
void SystemClock_Config(void);
static void MX_NVIC_Init(void);
uint16_t speed = 1000-1;
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM1_Init();
MX_NVIC_Init();
HAL_TIM_PWM_Start_IT(&htim1, TIM_CHANNEL_1);//打开定时器1通道1
while (1)
{
}
}
中断回调函数:
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)//内容在回调函数里写
{
if(GPIO_Pin == KEY1_Pin)//判断按键1 PA3是否按下
{
HAL_Delay(20);
if(HAL_GPIO_ReadPin(GPIOA, KEY1_Pin) == GPIO_PIN_RESET)//再次判断按键是否按下
{
HAL_GPIO_TogglePin(GPIOA, EN_Pin);//原先EN端给的低电平,正常状态运行,非自锁按键可快速切换使能状态
}
__HAL_GPIO_EXTI_CLEAR_IT(KEY1_Pin);//清除按键内容
}
if(GPIO_Pin == KEY2_Pin)//判断按键2 PB11是否按下
{
HAL_Delay(20);
if(HAL_GPIO_ReadPin(GPIOB, KEY2_Pin) == GPIO_PIN_RESET)//再次判断按键是否按下
{
HAL_Delay(20);
HAL_GPIO_TogglePin(GPIOA, DIR_Pin);//原先DIR端给的低电平,逆时针转动
__HAL_TIM_SetAutoreload(&htim1,1000-1);//恢复默认速度
}
__HAL_GPIO_EXTI_CLEAR_IT(KEY2_Pin);
}
if(GPIO_Pin == KEY3_Pin)//判断按键3 PA1是否按下
{
HAL_Delay(20);
if((HAL_GPIO_ReadPin(GPIOA, KEY3_Pin) == GPIO_PIN_RESET)&&(speed>100))//再次判断按键是否按下
{
HAL_Delay(20);
speed -= 100; //速度增加
__HAL_TIM_SetAutoreload(&htim1,speed);
}
__HAL_GPIO_EXTI_CLEAR_IT(KEY3_Pin);
}
if(GPIO_Pin == KEY4_Pin)//判断按键4 PA2是否按下
{
HAL_Delay(20);
if((HAL_GPIO_ReadPin(GPIOA, KEY4_Pin) == GPIO_PIN_RESET)&&(speed < 2000))//再次判断按键是否按下
{
HAL_Delay(20);
speed += 100; //速度减小
__HAL_TIM_SetAutoreload(&htim1,speed);
}
__HAL_GPIO_EXTI_CLEAR_IT(KEY4_Pin);
}
}
提示:
__HAL_TIM_SetAutoreload(&htim1,speed)函数是用来改变脉冲输出频率的,speed在这里就类似于ARR计数周期了