
激光SLAM怎么学?手把手教你Cartographer从入门到精通!
大家好,计算机视觉life经过几个月打磨,推出了激光SLAM逐行源码解析课程《Cartographer从入门到精通: 原理深剖+源码逐行详解》,已经购买过我们的课程学员及知识星球用户均有优惠券(见文末),欢迎抢购!
讲师亲自对Cartographer做了超详细源码注释,是目前唯一一个逐行讲解Cartographer的课程,彻底搞透代码。代码地址(持续更新):
https://github.com/xiangli0608/cartographer_detailed_comments_ws

Cartographer开源代码简介
1、Cartographer是Google推出的一套基于图优化的激光SLAM算法,它同时支持2D和3D激光SLAM,可以跨平台使用,支持Laser、IMU、Odemetry、GPS等多种传感器配置。该算法可以实现实时定位和建图。
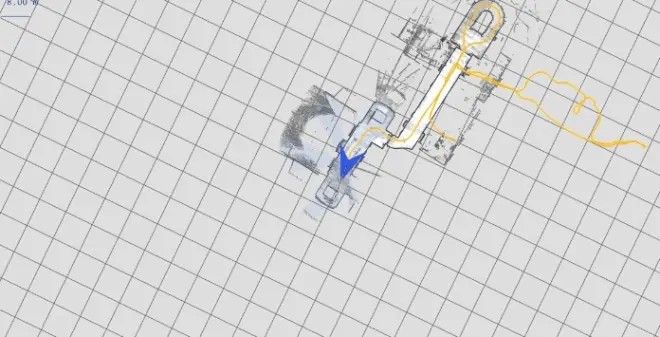
Cartographer建图过程
2、Cartographer建立的栅格地图可以达到5cm的精度,该算法广泛应用于服务机器人、扫地机器人、仓储机器人、自动驾驶等领域,是最优秀的激光SLAM框架之一。

Cartographer建立的地图
激光SLAM应用示例
扫地机器人

仓储机器人

自动驾驶

Cartographer有哪些需求岗位?要求待遇如何?



为什么学习该课程?学完课程你会收获什么?





讲师亲自对Cartographer做了超详细源码注释,是目前唯一一个逐行讲解Cartographer的课程,彻底搞透代码。代码地址(持续更新):
https://github.com/xiangli0608/cartographer_detailed_comments_ws
课程大纲

该课程适合谁?


课程说明、价格及购买方式


如对本课程有任何疑问,欢迎加入QQ群咨询
(已购买无需加入,在购买成功会自动显示内部答疑群)

