粒子群优化算法(PSO)的详细解读
本文转自知乎用户@追梦小公子,有删改,著作权归作者所有,非商业转载请注明出处。
关注微信公众号:数学建模BOOM,回复“028”,获取《MATLAB智能算法30个案例分析》,其中有粒子群算法的详细讲解与代码实现。
一、背景知识
1995年,受到鸟群觅食行为的规律性启发,James Kennedy和Russell Eberhart建立了一个简化算法模型,经过多年改进最终形成了粒子群优化算法(Particle Swarm Optimization, PSO) ,也可称为粒子群算法。
粒子群算法具有收敛速度快、参数少、算法简单易实现的优点(对高维度优化问题,比遗传算法更快收敛于最优解),但是也会存在陷入局部最优解的问题。
粒子群算法的思想源于对鸟群觅食行为的研究,鸟群通过集体的信息共享使群体找到最优的目的地。
如下图,设想这样一个场景:鸟群在森林中随机搜索食物,它们想要找到食物量最多的位置。但是所有的鸟都不知道食物具体在哪个位置,只能感受到食物大概在哪个方向。
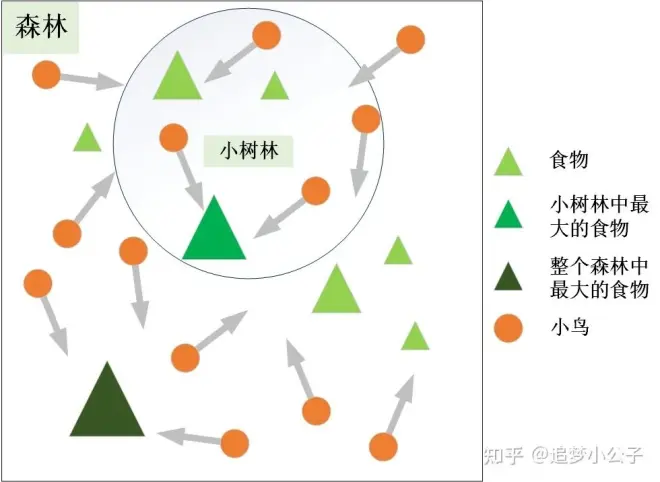
每只鸟沿着自己判定的方向进行搜索,并在搜索的过程中记录自己曾经找到过食物且量最多的位置,同时所有的鸟都共享自己每一次发现食物的位置以及食物的量,这样鸟群就知道当前在哪个位置食物的量最多。

在搜索的过程中每只鸟都会根据自己记忆中食物量最多的位置和当前鸟群记录的食物量最多的位置调整自己接下来搜索的方向。
鸟群经过一段时间的搜索后就可以找到森林中哪个位置的食物量最多(全局最优解)。
二、算法的基本原理
将鸟群觅食行为和算法原理对应,如下图:

鸟群觅食与粒子群算法的对应关系
(1)PSO的基础:信息的社会共享
(2)粒子的两个属性:速度和位置(算法的两个核心要素)
速度表示粒子下一步迭代时移动的方向和距离,位置是所求解问题的一个解。
(3)算法的6个重要参数
假设在 DD 维搜索空间中,有 NN 个粒子,每个粒子代表一个解,则:
① 第i个粒子的位置为:

② 第i个粒子的速度(粒子移动的距离和方向)为:

③ 第i个粒子搜索到的最优位置(个体最优解)为:

④ 群体搜索到的最优位置(群体最优解)为:

⑤ 第 ii 个粒子搜索到的最优位置的适应值(优化目标函数的值)为:

——个体历史最优适应值
⑥ 群体搜索到的最优位置的适应值为:

——群体历史最优适应值
(4)粒子群算法的流程图
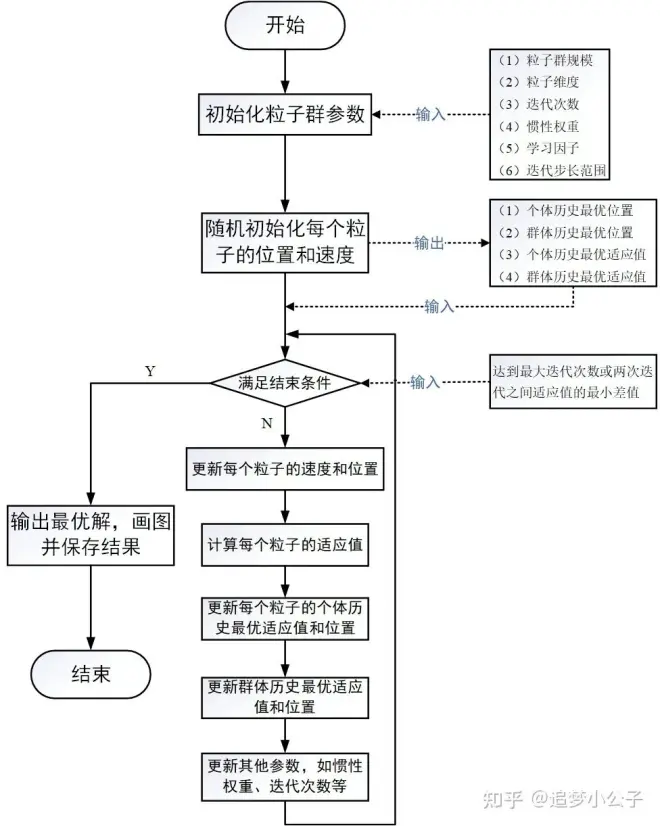
粒子群优化算法流程图
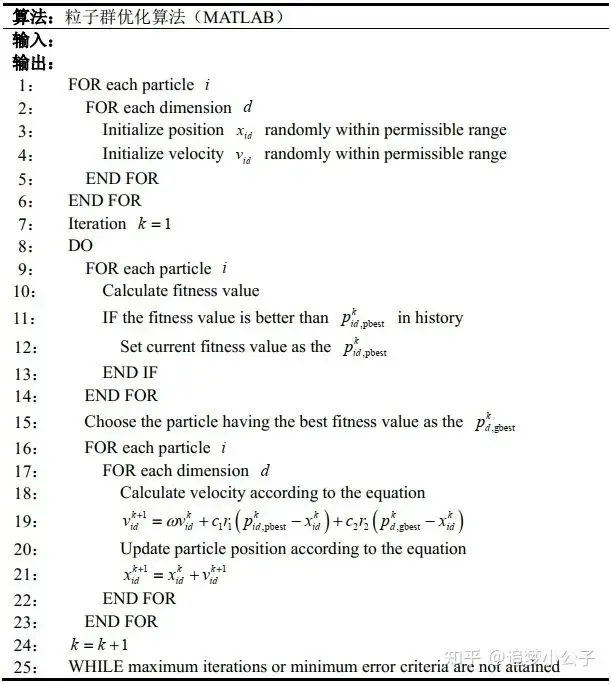
(5)粒子群算法的伪代码
三、速度更新公式
表述上叫速度,实际上就是粒子下一步迭代移动的距离和方向,也就是一个位置向量。

① 第一项:惯性部分
由惯性权重和粒子自身速度构成,表示粒子对先前自身运动状态的信任。
② 第二项:认知部分
表示粒子本身的思考,即粒子自己经验的部分,可理解为粒子当前位置与自身历史最优位置之间的距离和方向。
③ 第三项:社会部分
表示粒子之间的信息共享与合作,即来源于群体中其他优秀粒子的经验,可理解为粒子当前位置与群体历史最优位置之间的距离和方向。

(3)速度的方向
粒子下一步迭代的移动方向 = 惯性方向 + 个体最优方向 + 群体最优方向

四、位置更新公式
上一步的位置 + 下一步的速度

五、算法参数的详细解释
(1)粒子群规模:N
一个正整数,推荐取值范围:[20,1000],简单问题一般取20~40,较难或特定类别的问题可以取100~200。较小的种群规模容易陷入局部最优;较大的种群规模可以提高收敛性,更快找到全局最优解,但是相应地每次迭代的计算量也会增大;当种群规模增大至一定水平时,再增大将不再有显著的作用。
(2)粒子维度:D
粒子搜索的空间维数即为自变量的个数。
(3)迭代次数:K
推荐取值范围:[50,100],典型取值:60、70、100;这需要在优化的过程中根据实际情况进行调整,迭代次数太小的话解不稳定,太大的话非常耗时,没有必要。
(4)惯性权重:ω
1998年,Yuhui Shi和Russell Eberhart对基本粒子群算法引入了惯性权重(inertia weight)ω,并提出动态调整惯性权重以平衡收敛的全局性和收敛速度,该算法被称为标准PSO算法。
参数意义
惯性权重表示上一代粒子的速度对当代粒子的速度的影响,或者说粒子对当前自身运动状态的信任程度,粒子依据自身的速度进行惯性运动。
惯性权重使粒子保持运动的惯性和搜索扩展空间的趋势。ω值越大,探索新区域的能力越强,全局寻优能力越强,但是局部寻优能力越弱。
反之,全局寻优能力越弱,局部寻优能力强。较大的 ω有利于全局搜索,跳出局部极值,不至于陷入局部最优;
而较小的ω有利于局部搜索,让算法快速收敛到最优解。当问题空间较大时,为了在搜索速度和搜索精度之间达到平衡,通常做法是使算法在前期有较高的全局搜索能力以得到合适的种子,而在后期有较高的局部搜索能力以提高收敛精度,所以 w不宜为一个固定的常数。
改善惯性权重 ω
在解决实际优化问题时,往往希望先采用全局搜索,使搜索空间快速收敛于某一区域,然后采用局部精细搜索以获得高精度的解。
因此提出了自适应调整的策略,即随着迭代的进行,线性地减小 ω\[\omega\] 的值。这里提供一个简单常用的方法——线性变化策略:随着迭代次数的增加,惯性权重ω不断减小,从而使得粒子群算法在初期具有较强的全局收敛能力,在后期具有较强的局部收敛能力。

ωmax——最大惯性权重;ωmin——最小惯性权重;
iter——当前迭代次数;itermax——最大迭代次数。
(5)学习因子: c1,c2
也称为加速系数或加速因子(这两个称呼更加形象地表达了这两个系数的作用)
c1表示粒子下一步动作来源于自身经验部分所占的权重,将粒子推向个体最优位置的加速权重;
c2表示粒子下一步动作来源于其它粒子经验部分所占的权重,将粒子推向群体最优位置的加速权重;
c1=0:无私型粒子群算法,"只有社会,没有自我",迅速丧失群体多样性,易陷入局部最优而无法跳出;
c2=0:自我认知型粒子群算法,"只有自我,没有社会",完全没有信息的社会共享,导致算法收敛速度缓慢;
c1,c2都不为0:完全型粒子群算法,更容易保持收敛速度和搜索效果的均衡,是较好的选择。
六、算法的一些重要概念和技巧
(1)适应值(fitness values)
即优化目标函数的值,用来评价粒子位置的好坏程度,决定是否更新粒子个体的历史最优位置和群体的历史最优位置,保证粒子朝着最优解的方向搜索。
(2)位置限制
限制粒子搜索的空间,即自变量的取值范围,对于无约束问题此处可以省略。
(3)速度限制
为了平衡算法的探索能力与开发能力,需要设定一个合理的速度范围,限制粒子的最大速度,即粒子下一步迭代可以移动的最大距离。
较大时,粒子飞行速度快,探索能力强,但粒子容易飞过最优解;
(4)优化停止准则
一般有两种:
① 最大迭代步数
② 可接受的满意解:上一次迭代后最优解的适应值与本次迭代后最优解的适应值之差小于某个值后停止优化
(5)初始化
粒子群算法优化的结果受很多因素的影响,其中受粒子初始值的影响比较大,而且较难调控。
如果粒子初始值是随机初始化的,在不改变任何参数的情况下,多次优化的结果不一定都收敛到一个全局或局部最优解,也可能会得到一个无效解。所以粒子初始化是一个十分重要的步骤,它关系到整个优化过程中优化收敛的速度与方向。
如果粒子的初始化范围选择得好的话可以大大缩短优化的收敛时间,也不易于陷入局部最优解。
我们需要根据具体的问题进行分析,如果根据我们的经验判断出最优解一定在某个范围内,则就在这个范围内初始化粒子。如果无法确定,则以粒子的取值边界作为初始化范围。
在北理工韩宝玲教授的"基于粒子群算法的四足机器人静步态优化方法论文中采用了拉丁方抽样方法来解决粒子初始化问题,大家可以尝试一下这种初始化方法。