
自从有了它,机器人都横着走了
全向底盘具备结构简单、运动灵活等特点。常见的全向底盘主要有2种:使用麦克纳姆轮构建的全向底盘、使用连续切换轮(福来轮)构建的全向底盘。

在机器人技术迅速发展的今天,机器人的移动技术也是不断发展的,轮式移动系统是目前应用最广泛和最可靠的移动机构。相对于目前已有的其它移动系统形式(如履带式、蛇形式、跳跃式和复合式等)而言,轮式移动系统的优点为运动效率较高、承载能力较强、结构形式丰富、驱动控制相对简单、运动方式机动灵活、行进速度相对较高,适用于物流仓储行业(叉车)、工程车、清洗机器人、星球探测车、服务机器人等。移动机器人运动的灵活性是各种功能的基础,目前移动机器人多采用全向轮移动机构,为了实现全向移动,一般机器人会使用连续切换轮或麦克纳姆轮这两种特殊轮子。
连续切换轮与麦克纳姆轮的共同点在于他们都由两大部分组成:轮毂和辊子。轮毂是整个轮子的主体支架,辊子则是安装在轮毂上的鼓状物。连续切换轮的轮毂轴与辊子转轴相互垂直,而麦克纳姆轮的轮毂轴与辊子转轴呈 45° 角。连续切换轮与麦克纳姆轮在结构、力学特性、运动学特性上都有差异,其本质原因是轮毂轴与辊子转轴的角度不同。

因为麦克纳姆轮相对于连续切换轮最大的区别是它的轮辊安装不是90°而是呈45°,因此一些以麦克纳姆轮为底盘的运动装置可以实现横移、前行、旋转、斜行及其组合运动方式。麦克纳姆轮全向底盘的典型分布方式为H型分布。

连续切换轮的典型分布方式主要分为三角形分布和十字形分布。由于其特殊的结构,连续切换轮全向底盘按轮数以及结构不同可分为:三轮全向底盘、四轮全向底盘、六轮全向底盘。

今天我们来介绍一下十字形分布的连续切换轮(福来轮)全向底盘的结构设计与控制。

一、全向底盘机械系统
该项目利用探索者平台制作。这里以福来轮全向底盘机器人为例。其驱动系统采用精度较高的42步进电机;执行末端为伺服电机。通过四个步进电机运动的相互配合,四个步进电机驱动将圆周转动转化为直线运动。

二、全向底盘运动学示例
全向福来轮底盘的一个特点是可以灵活的全向移动,四轮全向轮的全向移动需要四个轮的相互配合,运动方向和各个轮的转向关系如下图所示(箭头方向表示轮或车的运动方向):

多边形绘制算法:
正六边形和其它多边形有一个相同的条件-每个顶角角度一致 ,并且所有的多边形外角=360/n(n 为边数),这样的话两条相邻边的角度是一致的,所以在这里我们采用了一种算法:
该算法的思路是:先以多边形的一个顶点 A 创建直角坐标系,然后确定相邻一条边上另一个顶点 B 的坐标,利用插补法完成一条边的绘制,然后再以顶点 B 为原点创建一个直角坐标系,继续绘制下一条边,重复上面的流程,完成多边形绘制,通过这种方法,我们只需要知道多边形的边长和边数就可以完成任意正多边形的绘制。
多边形计算公式:

n—为循环中绘制的第几条边为 0~(m-1)变量值
m—总边数
L—边长
备注:坐标系原点为上一笔最终点,坐标系方向不变。
三、全向底盘的结构
全向福来轮由主轮和副轮组成,主轮和副轮成垂直分布。

全向底盘采用十字形分布的福来轮作为执行轮时,每个轮在斜 45°方向安装,如下所示:


一、主要使用的电子硬件
Basra控制板、BigFish扩展板、SH-ST扩展板。

二、电路连接
① 硬件连接-电子元件

② 电路连接
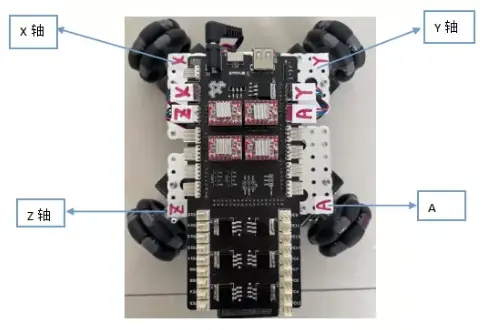
按下图进行电路连接, 我们先对机构的关键部件进行编号(见下图):
接下来把步进电机线与扩展板进行连接(见下图):


一、程序编写
编写程序并实现功能,下面给大家提供一个福来轮全向底盘机器人绘制正多边形的参考例程,将其烧录至主控板中。

二、效果演示

福来轮全向移动底盘机器人除了可以绘制正多边形,还可以实现写字、绘制图形、绘制特定曲线等功能。【详细的程序源码可加QQ交流群:221964861进行获取】

