
对于四旋翼无人机在未知环境下在线轨迹规划的初步了解
一、背景意义
目前,对于无人机可以在已知环境下通过运动捕捉系统来实现积极、高动态飞行。然而,这些现有的规划器还没有被证明能够在未知的户外环境中进行同样的飞行。因此,无人机等机器人在杂乱和未知的环境中具有非微观动力学的轨迹规划是一个非常活跃的研究领域。这个领域可以应用于地面和空中交通工具的自主导航、仓库和医疗机器人以及移动机械手等,实现自主作业、位移操作。
无人机怎样才能在一个未知的、杂乱的、没有GPS的环境中实现在线轨迹规划?通过机载传感器,这要求规划者必须能够对发现的障碍物作出足够快的反应,以保证安全。因此,目标是在高度反应的飞行时间范围内找到一条平滑、高速、无碰撞和动态可行的三维轨迹。
二、相关介绍
对于轨迹规划,目前有基于优化的规划器,其可以找到最佳解决方案(如最短路径,最小能量),但它们存在着高计算成本,不确定的解决时间,并经常需要良好的初始化。这些缺点使其不适合无人机在线轨迹生成。对于基于采样的规划器,会有一个可预测的执行时间,但是解决方案的质量受限于抽样措施的选择。这些规划器试图通过完全依赖瞬时的传感器测量来最小化计算负荷,允许高的重新扫描率,但深度传感器有限的感应范围使计划者变得近视。这可能会导致被困在局部最小值中,对全局的认识不足。
当然有些工作结合了基于优化和基于采样的规划器的许多最佳品质,使用一个分层的规划架构,考虑到深度信息的瞬时和融合历史。这样可产生一个路径短、可预测时间、平滑、安全、动态可行的轨迹。满足了视觉系统在相对平滑的相机运动的条件,使其表现最好;同时使得视觉-惯性导航系统能够增加相机帧之间的可追踪特征的数量,并减少状态估计器输出之间的位置和旋转的不连续性。另外一个好处就是,平滑的轨迹可以减少能量消耗。
三、运动规划步骤
参考相关文献,得到一种适合无人机在未知环境中飞行时高效的轨迹生成。其首先展示了如何通过根据障碍物密度规划速度,在未知环境中快速飞行时保持安全系数;采用滚动优化、基于采样的运动规划器使用最小抽动轨迹和闭环跟踪来实现平滑、稳健、高速的飞行,并具有准确的视觉惯性导航所需的低角速率。该方法完整的运动规划主要由五个步骤组成:①沿着机器人当前轨迹计算一组基于未来状态的最小冲击运动基元(minimum-jerk)②基于占位网格找到一条稀疏化的全局3D路径到目标位置。③在全局路径上选择一个局部目标作为运动基元的滚动时域目标。局部目标到四旋翼飞行器的距离取决于飞行器的速度④根据动态可行性、深度图像、占用网格和到移动局部目标的距离来评估运动基元,并基于加权代价函数选择最佳的运动基元⑤以最小的代价跟随运动基元,直到新的深度图像到达规划算法的所有步骤及其相关的更新率。
(1)对于最小冲击运动基元集生成:通过对偏航、最终高度和与飞行器的距离进行抽样,产生一套空间上和动态上不同的X自由运动基元,然后通过在所有候选轨迹上使用一个恒定的时间,自然会发生对速度的抽样。选择的运动基元的初始状态为未来50毫秒内的当前轨迹。未来的这一点是连接点,我们将从这一点开始追踪下一个运动基元。只考虑具有固定最终速度和加速度的基元,所以整套运动基元是由最终位置集Pf定义的:

L = { l0,..,ln }分别改变末端位置和速度峰值,ψ = { ψ0,..,ψo }改变航向(表示为一个欧拉角),H = { h0,..,hp }改变高度,en为沿第n轴的单位矢量。

(2)对于规划网格和移动局部目标:进程中运行的全局计划器,为其提供一个局部目标,局部目标为滚动优化规划器的导航目标。全局规划器保持两个以身体为中心的三维体素网格,第一个网格是一个概率占用网格,包含深度传感器测量的融合历史;第二个网格是距离网格,提出的增量距离变换,用一个短的截断距离来跟踪每个体素与最近的障碍物的接近程度。全局规划器在占有率网格、距离网格和用户指定的目标高度的加权和上运行广度优先搜索,以提取一条最小成本的路径。然后,该路径被稀疏化,并用于为轨迹规划器生成一个局部目标,其前瞻距离与四旋翼飞机的速度成正比。
(3)定义成本:首先检查基元的控制点是否与占用网格或深度图像发生碰撞。处于碰撞状态的轨迹被排除(碰撞成本)。第二,给每个基元增加一个成本,取决于占用网格外或未知空间内的控制点的数量。第三,再添加一个成本,在本地目标和基元的最终位置之间的距离dgoal呈线性增长。第四,对于每一个控制点,增加一个成本,与期望高度之间的距离dalt线性增加。最后,根据障碍物与运动基元的距离增加一个成本,这就要求在控制点的固定距离d内找到所有障碍物。最后一个成本可以通过将占位网格转换为K-D树,并使用近似的近邻搜索来获得距离d内的n个控制点的所有邻居。因此,分配给每个基元的总成本为:

其中,ci为个体成本,kj为个体收益,m为占用网格中占用的单元数,V为基元初始速度。最后选择成本最低的轨迹。

四、滚动优化规划器的优势
(1)轨迹更加平滑:通过实验比较了一个用于激进机动的最小时间状态空间采样规划器和一个控制空间采样的运动基元规划器得到利用连续的Minimum jerk规划可以实现更高的轨迹平滑度。因为其角速率频率明显较低,90 %的频率在10 Hz以下,而其他规划器只有77 %和59 %。

(2)路径质量:通过利用规划网格的全局路径规划器获得的路径与250、1000和5000个样本的RRT *进行比较。在RRT*找到解决方案的情况下,计划的路径平均比RRT*1000短18.2%,比RRT*250短21.6%,但比RRT*的5000样本长1.8%。但是计算RRT*路径的运行时间超过了我们的规划器好几个数量级。

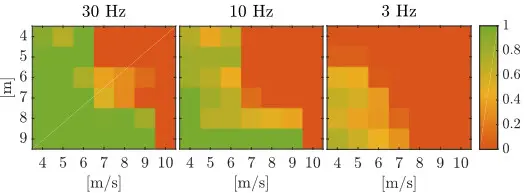
(3)规划器反应性:当一个垂直的圆柱形障碍物(直径为1米)瞬间出现在无人机前面时,无人机被命令沿直线飞行。模拟了不同的初始速度(4-9米/秒)和到障碍物的距离(410米),车辆被认为要避开障碍物。可以得到是在30赫兹的额定控制频率下,所有出现在9米距离内、车速为9米/秒的障碍物都可以被避开。在3赫兹的控制频率下,只有28%的障碍物可以被避开。如下图所示:
(4)动态速度可调:无人机在穿越泊松森林环境时,在障碍物密集区域会降低飞行速度,在空旷地带,会提高飞行速度,这样保证了飞行的安全性,也大大提升了飞行效率。下图显示了规划器使用这些固定速度产生的轨迹长度和持续时间。随着固定速度的增加,穿越泊松森林的时间减少(图8中的红条),而跟踪的轨迹长度增加(图8中的蓝条)。

五、总结
提到的一种滚动时域轨迹规划器,用于在未知和杂乱的环境中快速飞行。该方法能够实时地推理环境的几何结构,同时在快速、平稳和稳健的飞行过程中保持安全裕度。未来可以通过增加搜索深度,在单个规划步骤中合并多个最小Jerk轨迹的序列,进一步缩小车辆的规划范围,并利用本地占用网格中的所有可用信息。
六、参考文献
[1]Ryll M, Ware J, Carter J, et al. Efficient trajectory planning for high speed flight in unknown environments[C]//2019 International conference on robotics and automation (ICRA). IEEE, 2019: 732-738.
