
基于滑模观测器的滑模控制算法在buck变换器中的电流跟踪控制应用
前面文章我们介绍了滑模观测器的基本原理以及仿真实现。在本文我们针对上一文中对应视频讲解中留下的课后思考题,进行一个应用讲解,即基于滑模观测器的滑模控制算法在buck变换器的应用。算法分成两部分——滑模观测器设计和滑模控制设计。
1、滑模观测器设计
首先,我们给出buck变换器如下图所示
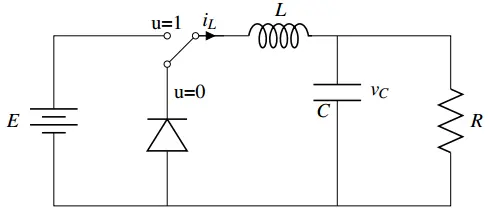
根据开关状态的不同我们可以列写得到buck变换器的状态方程:
在本文中,我们假设电容电压vc是可以采集的状态变量,而电感电流iL是需要观测的状态,则根据前面文章的介绍,我们可以设计如下状态观测器:
则每个状态的观测误差动态性可以表示为
式中,,
在这里观测增益可以选择为
其中k1和k2是可以调节的常数。
2、滑模控制器的设计
在本文中,我们以电感电流作为跟踪控制的目标,则滑模面可以设计为
对上式求导则有
我们选择滑模为指数趋近律则有
则通过对常数a和b适当的选择,可以使得滑模面满足
最后,我们可以计算得到等效控制ueq的表达式为
则整个系统的控制框图可以表示为

为了验证上述理论,我们在Simulink环境下搭建相关模型,其中buck变换器的参数与前文中提及的buck变换器参数一致,而电阻R=2Ω。为了验证控制算法的特性,我们设置电感电流的参考值变化如下图所示

实际仿真过程中,输出端电压的估计结果和电感电流的估计如下所示


可以看到观测的结构存在一定的误差,但是误差不超过5%符合要求。最后我们给出了输出电压的波形的局部放大图,可以发现在滤波电容为100uF情况下,电压的脉动很小,且暂态过程中电压的超调量很小。在满足上述性能的情况下,本文的方法在减少了电流传感器的情况下对电感电流实现了有效的跟踪控制。

