
有点另类的F4刷ardupilot(APM)的方式,以及刷完之后的简明设置教程
友情链接贴,刷固件前强烈建议先看此贴,有好东西,看完必定后悔,后悔为什么没早点看到!
【企鹅版APM固件全球首发】内置OSD加入雷达方位角与单节电压显示
http://bbs.5imx.com/forum.php?mod=viewthread&tid=1558102
论坛里F4刷APM的教程也有好几个了,我再重复别人讲过的东西也没啥意思,在这里我就教大家点不一样的,反正道路千万条,条条通天堂
先下载一些必须品吧,我都准备好了
DfuSe_Demo
链接:https://pan.baidu.com/s/1lQCDvk_eTHAPCTuUI_LoeA
提取码:ng26
地面站Mission Planner(你也可以自己去官网下载最新的)
链接:https://pan.baidu.com/s/1e4Ni7uJxJ4iH-PRzM-IbtQ
提取码:rcuv
APM固件:
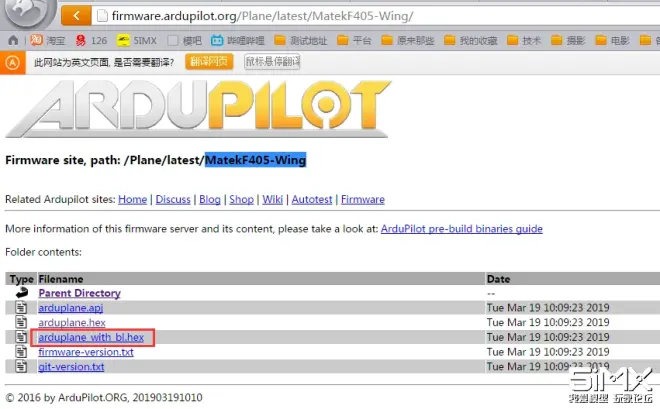
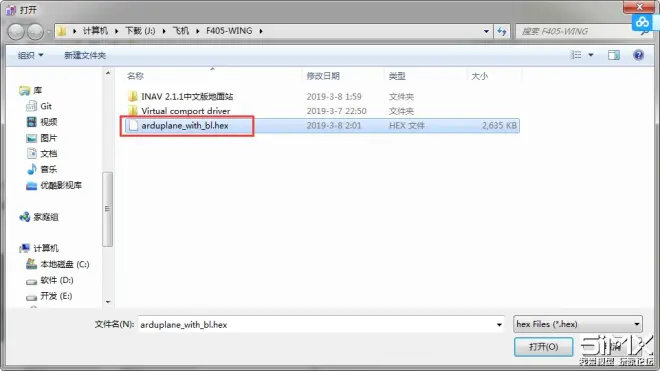
链接:http://firmware.ardupilot.org/Plane/latest/请大家根据自己的飞控板选择所对应的固件点开对应的文件夹
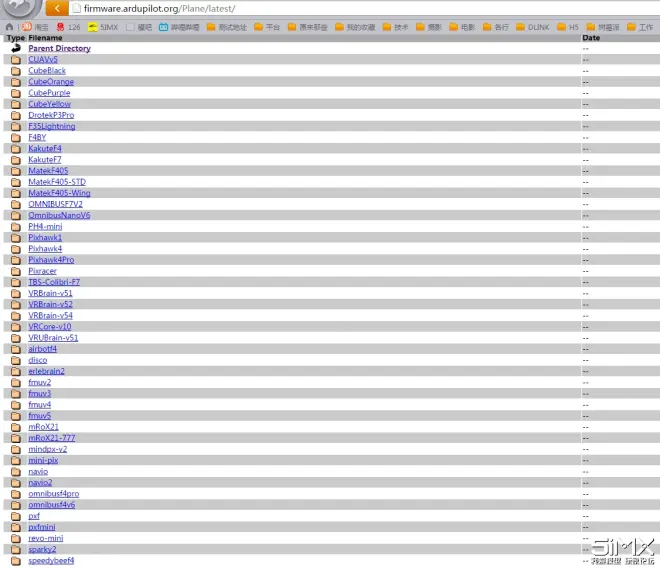
比如我用的飞控是F405-WING,那么我就点进MatekF405-Wing目录,进入目录后必须选择arduplane_with_bl.hex这个文件来下载,不要下错哦,下错的话刷进去插USB电脑是识别不到硬件的,但是刷错不会导致飞控损坏,重新刷正确的就可以了
串口驱动(如果电脑安装有可以不需要下载)
链接:https://pan.baidu.com/s/1K8sNOFhV5TWEt_CQ91MosQ
提取码:6bva
下面可以开始了:
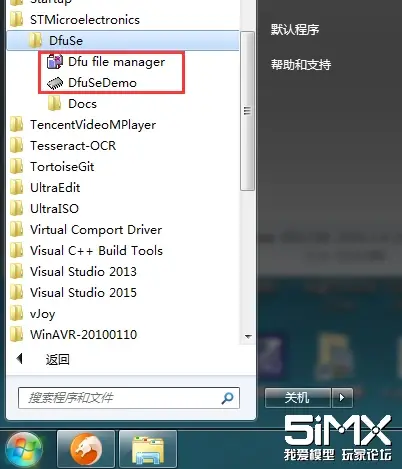
1.安装DfuSe_Demo
2.安装完DfuSe_Demo后,打开Dfu file manager,先把原生的.hex结尾的固件转换一下,转成.dfu的文件,再用这个工具刷进飞控里
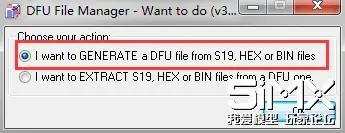
3.选择I want to GENERATE......这一项,然后点OK
4.再选择S19 or HEX
5.选择帖子刚开始分享的固件文件,点击打开
6.点击Generate
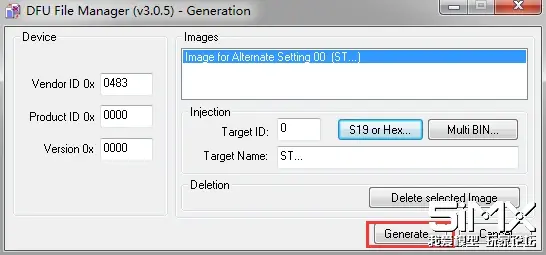
7.给要生成的dfu文件命个名,比如说apm.dfu,到这一步我们就已经完成从.hex到.dfu文件的转换了
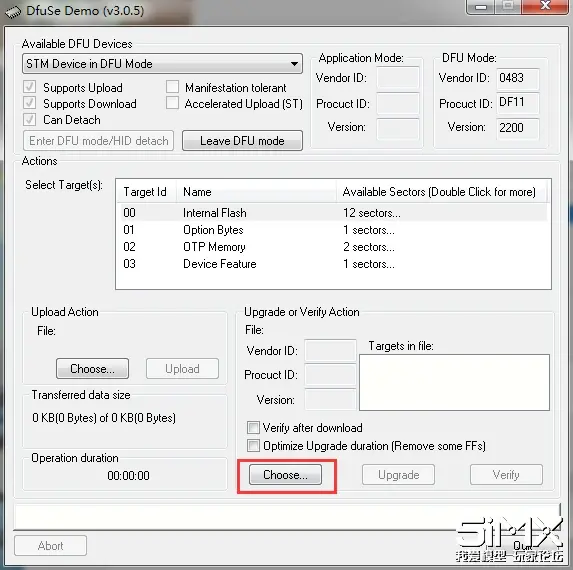
8.那现在就可以刷机拉,打开DfuSeDemo
9.按住飞控上的DFU按钮,然后插USB,电脑识别出硬件之后,这个软件上就会显示出一些硬件相关的信息,如果连接未成功的话中间这个白色的框里是什么信息都没有的,如果你操作之后发现软件上并没有这些信息出现,那就证明电脑没正确识别硬件,需要装一下帖子开头分享的驱动。装好之后再尝试。
你可能会碰到的问题:
如果你发现按着DFU按钮再插USB,软件依然识别不出硬件。那有可能是你之前刷过INAV或者BF之类的飞控固件,为些装了一些驱动。导致这些驱动覆盖了当前的DFU驱动。很典型的现像就是你的飞控被识别成了Impulse Flight Controller设备,这个时候你只要将这个硬件卸载,同时卸载驱动程序,然后电脑马上正确识别DFU设备了
接下来点Choose,打开刚才转换好的apm.dfu文件
10.点击Upgrade开始升级
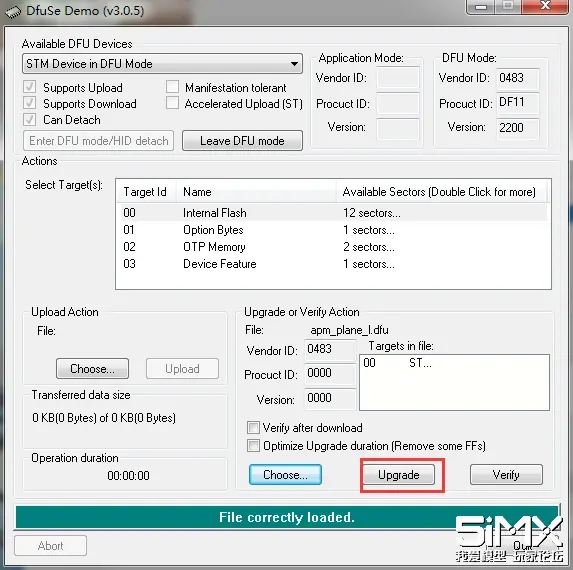
并在弹出的提示框中点是
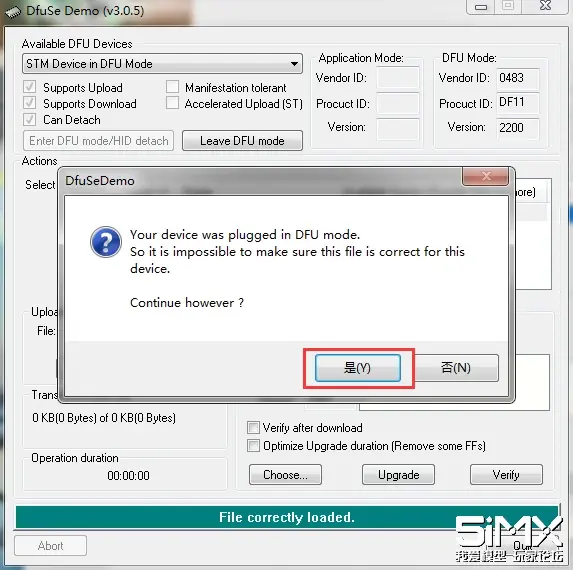
然后等着进度条跑完,显示Upgrade successful!的时候,就可以拨掉USB了

到这里就大功告成了,你手上的F4就已经可以当成APM直接使用,连接Mission Planner地面站了,跟使用APM/PIX没有任何区别了。
需要注意的一点:
如果刷完固件之后,插USB电脑不识别硬件,插了跟没插似的,这个时候你就需要先给飞控上电,再插USB,电脑就能正常识别硬件了。我使用的F405-WING飞控是这样的,像其他的版本不知道是否需要这样操作,可以试试,基本不是什么大问题。不行就上电再插USB咯。
********************我是一条淫*******荡的分割线*************************
这一个部分我只针对玩过Ardupilot的人或者有一定基础和研究能力的人做一些简单的叙述,不再做特别详细的指引,如果完全是新手小白,建议去看更加初级的教程,B站搜索有很多
说完了刷固件,接下来说说怎么进行初步的设置才能开始飞行吧。飞控插上电脑,连接地面站。
1.安装固件,从本地选择下载好的固件写进去(这步已经完成,跳过)
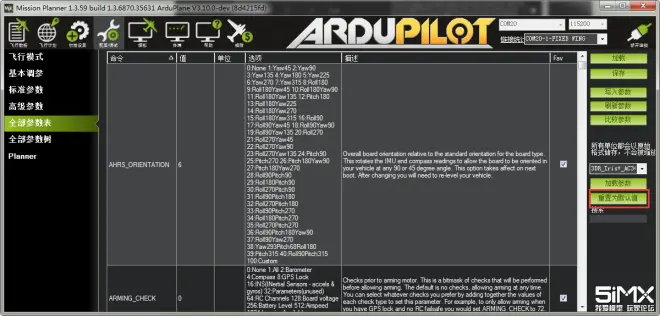
2.配置调试 全部参数表 右边点重置默认值(这步必须要有,不然可能会出现一些奇怪的问题)
3.摇控器校准,太简单了,就不细说了
4.设置好飞控的安装方向,通过AHRS_ORIENTATION这个参数来设置
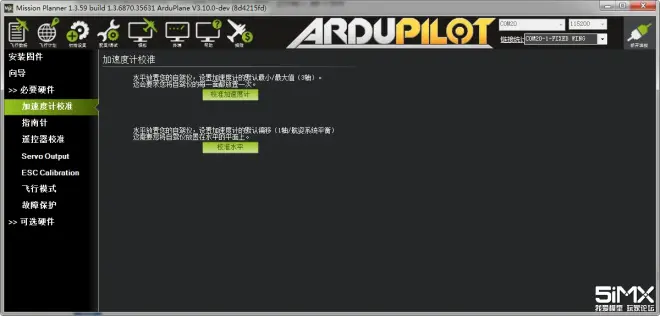
5.校准加速度计,并禁用罗盘(固定翼不需要罗盘)
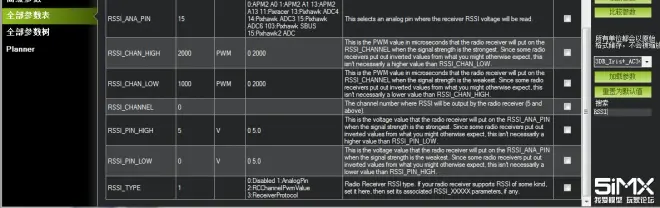
6.设置RSSI类型以及RSSI相关参数,就下边这堆
7.电流计设置,基本不用改,电压电流可以根据实际情况自己精调一下(因为是内置电流计,而且初始设置基本上也挺准了,一般不需要改动)
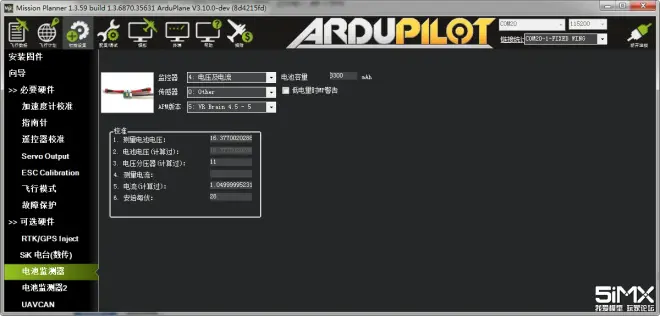
8.OSD设置,启动遥测

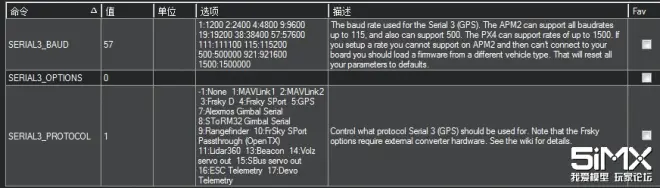
如果需要外挂OSD,请自行去打开相应的串口并设置串口的协议为mavlink,比如我就是外挂OSD的,我的OSD插在串口3上边
9.如果你还安装了空速计,那就搜一下全部参数,输入ARSPD,这样所有关于空速计的参数就都出来了,英文不好的就看一下别人发的中英对照表,或者用翻译软件翻译一下吧。
主要就是设置一下空速计的类型,针脚位置,飞机最小空速这几个参数就好,其他的到了外场再进行校准吧
10.装机,说一说飞翼的设置方式,去到Servo Output一页,我的两个副翼是接在3,4通道,油门是1通道的,大家主要看3和4通道怎么设置的就可以了
重点:设置好之后先打到自稳模式摇摆一下飞机看反馈对不对,如果不对,就尝试把其中一个通道反向的那个框勾上,继续试,不行再勾另一个,反正总有一个组合是能够正确反馈的。这里完成之后,在摇控打舵看对不对,如果摇控打舵发现反了,就自己在摇控的输出那里做个反转就可以了。
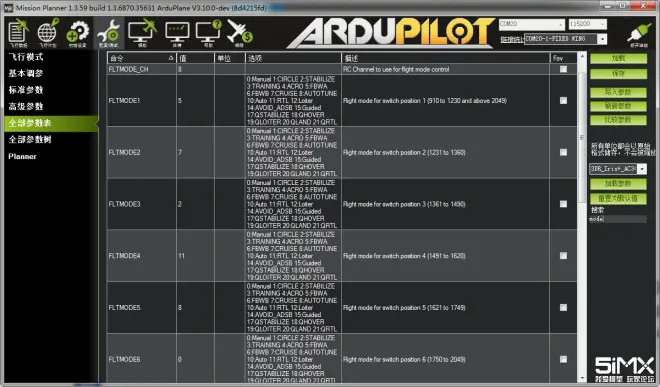
11.设置飞行模式,设置好自己想用的飞行模式。每个摇控切换飞行模式的混控设置都不一样,这个就留给大家自己去研究了,在此不细说
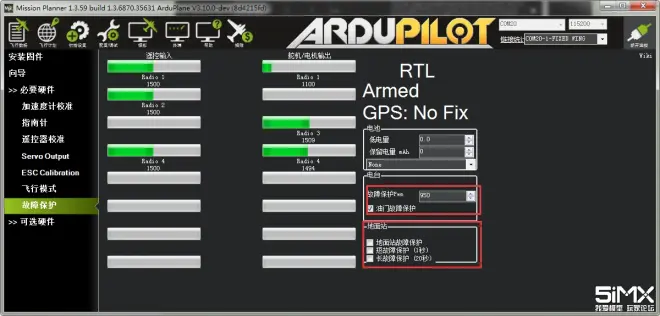
12.失控保护,设置好后请关控测试,这一步务必要成功,不然丢机的话我就要恭喜一下你了(油门最低PWM值保护,如果你用数摇一体或者有装远距离数传建议打开地面站失联保护)
13.还有一些最大俯仰角设置,返航高度拉,PID这些可以飞行之后根据自己的需要再进行调整
基本上这些都设置完成之后,并且飞机自稳反馈正常,摇控打舵正常,飞行模式切换正常。就可以去试飞了。
一些后话
可能有些人对ardupilot的固件有些误解,认为它是个老掉牙的东西,其实固件是一直在更新的,老掉牙的是APM 2.8那些老旧的硬件平台,因为那些平台性能以及硬件资源不足,针对那些老平台的固件已经不再更新了。但是针对这些新硬件平台的固件还一直有在更新,像F4这些平台,所以要搞清楚这个事情哦。
最后简单分享一下我玩开源固件的心得。
先说说本质,本质就是一堆参数,地面站的各种美观的界面只是更加方便你去设置,设置完了还是会变成一个数值保存到参数里头。在设置界面上任何的设置,在参数表里都有一条与之对应的参数,也就是说你也可以不在界面上设置,去到所有参数表里头直接把那个参数搜出来,将它设置成你要的值。我打个比方。
就拿飞行模式的设置来说,我可以在界面上设置1到6分别是什么飞行模式

当然我也可以直接去所有参数表里头,把飞行模式的参数搜出来,然后去设置它的值,也同样能达到目的,反正都是改参数,方式不一样而已。
再说说开源控跟商品的区别,其实开源固件跟我们常见的一些商品飞控的区别在哪呢,在我看来,区别就是开源固件参数更多,可以调整的更加细致。而商品控很多参数已经帮我们调好了,需要我们调的参数也就只有几个,相对来说比较简单。但是,但是!开源的玩起来很多时候也不需要去了解完所有的参数,因为一般我们玩FPV是不需要用到这么多参数的,也就是说其实需要我们调的常用的也就是那几个参数,别的参数我也是一概不知,所以也没比商品控多多少。希望大家看完我这个教程后可以消除对开源控的一些恐惧,大胆的折腾一把,当你设置好第一台飞机,并成功飞起来之后,你会深深爱上开源的。
在此也分享一下我的云笔记记下的常用参数表以及对应的解释,也方便以后大家装机的时候翻来看看,如果还有哪些常用的参数没记录到,可以直接在这个链接内评论,让我加上哦,谢谢大家观看。
http://note.youdao.com/noteshare?id=d8c810a757381e83d06d7ac236b368db&sub=3B0A716EE26F485ABDFF681CC1927E39
