
干货|地铁隧道打孔机器人
注:每日专栏发布上限5篇,更多资讯欢迎进群了解。

文章来源:中铁上海局轨道交通研究院
源网址:https://mp.weixin.qq.com/s/Ii4cr33AY6Jp6BkOuMQ3SQ
地铁隧道打孔机器人
专利号:CN202311025922.3
基本概况
地铁隧道建成后,需要架设电缆、光缆、漏缆、传感器、照明灯等设施,安装这些设施需要大量钻孔,据统计,地铁隧道打孔量达到每公里6万个。
针对上述问题本发明提供了一种隧道打孔机器人及其智能目标识别与自动化打孔方法,属于智能机器人技术领域。
所设计的地铁隧道打孔机器人,输入相关孔位参数信息,系统将自动进行打孔规划。基于视觉跟随系统和激光定位靶标系统,精确定位目标打孔位置。能够远程检测操控,实现隧道内无人化工作。
有效解决了传统的打孔方法所存在的无法解决钻孔间距的控制、角度调整、无法适应现场复杂多变的施工要求等问题。
结构简介
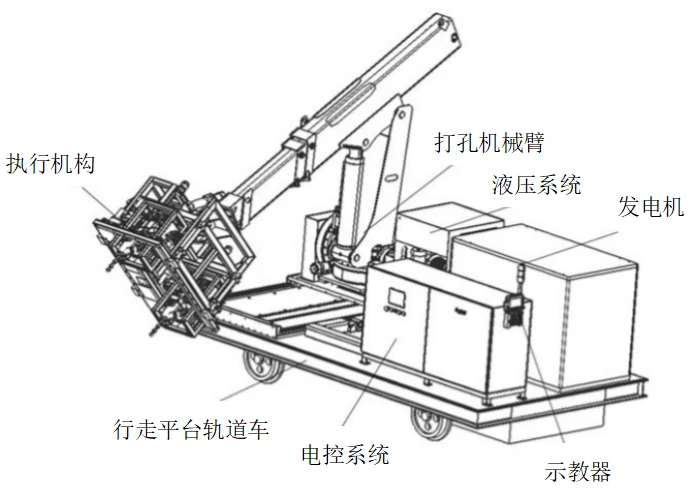
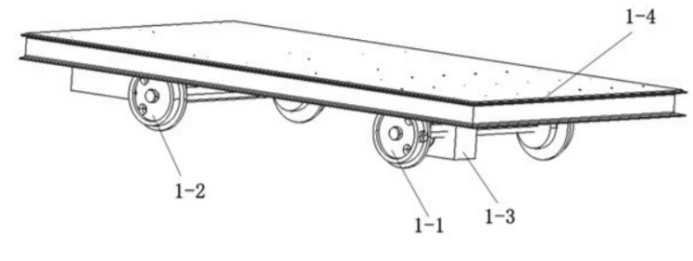
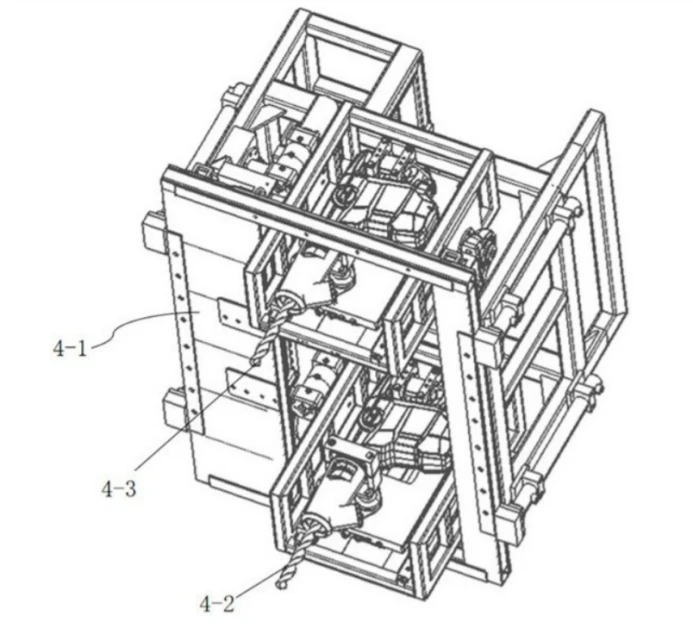
隧道打孔机器人包括电控系统以及与电控系统信号连接的行走平台轨道车、示教器、发电机、液压系统、打孔机械臂、执行机构。
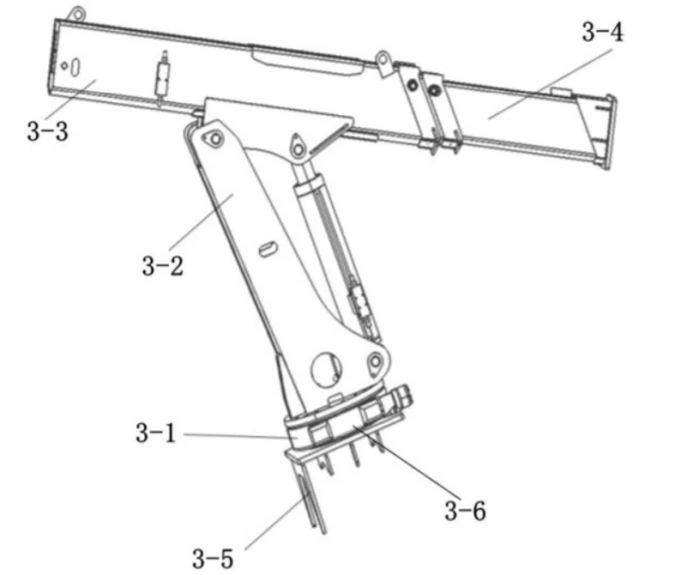
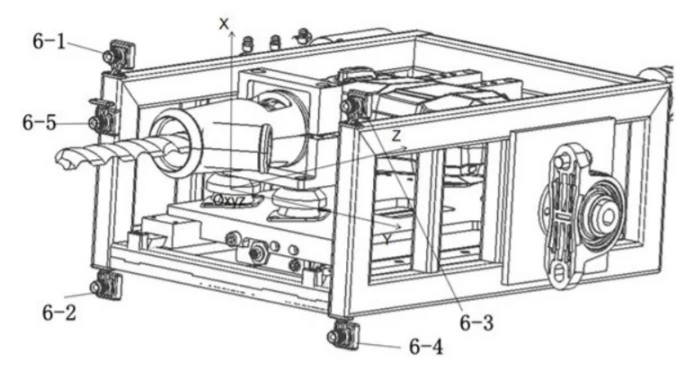
执行机构包括固定在打孔机械臂的机械臂头架上的钻头,机械臂头架四角处安装有激光传感器A、激光传感器B、激光传感器C、激光传感器D,机械臂头架上还安装有智能视觉相机。
作业流程
步骤1
向示教器中输入系统参数,启动行走平台轨道车,带动打孔机器人整体移动至第一个目标打孔点附近。
步骤2
智能视觉相机进行视觉检测,在可见打孔区域内检测目标位置,将检测到的图像数据传递至电控系统,同时,激光传感器A、激光传感器B、激光传感器C、激光传感器D 将获得的距离数据也传递至电控系统;电控系统对接收到的数据进行分析处理,计算出钻头与目标位置的距离差值以及夹角。
步骤3
电控系统通过步骤2计算出钻头与目标位置之间的距离以及夹角数据后, 结合打孔机械臂的期望位置,基于模糊PID控制原理计算得到目标位置控制量,然后由电控 系统根据目标位置控制量控制行走平台轨道车运动以及控制打孔机械臂带动钻头末端运动,使得钻头末端与目标打孔点精确对准。
步骤4
钻头末端调整至垂直于目标打孔点时,电控系统基于目标位置控制量控制机械臂底座移动,使钻头靠近目标位置。
步骤5
钻头按钻深钻孔,钻孔完成后,机械臂底座回到原位。
步骤6
行走平台轨道车根据钻进间隔,移动到下一个需要钻进的位置,然后重复步骤2至5,继续钻孔。
步骤7
当一侧钻孔作业完成后,通过打孔机械臂切换到另一侧继续同样的钻孔作业。
优势分析
隧道打孔机器人引入视觉识别技术,采用智能视觉相机和激光传感器相结合的方法,实现了钻孔目标的三维定位和钻头与目标平面相对角度的计算。
进而能够更快更准的实现目标点的识别并控制机械臂运动,实施完整的打孔作业,使该隧道打孔机器人具有广泛的社会运用前景。
有效解决了传统的打孔方法所存在的无法解决钻孔间距的控制、角度调整、无法适应现场复杂多变的施工要求等问题。


