
【控制】学习笔记——非线性控制

没有系统学习过现代控制,更没系统学过非线性控制。今天又花了大半天时间看了一遍DR.CAN的非线性控制视频。这次有了比较深刻的认识。下面以非线性弹簧模型为例,用三种典型的控制方法实现稳定控制。
这里弹簧是非线性的,而且还是一个双积分系统,非常有代表性。美中不足的是这里只考虑了稳定性,并没有考虑动态性能。
下面是三种控制方法的理论:

这里反步法其实就是反馈线性化在双积分系统中的应用。通俗讲:希望跟上目标位置,就能反推出目标速度,希望跟上目标速度,就能反推出目标力,而力就是控制量。最终实现通过改变力跟随目标位置的目标。

不同于反馈线性化,这里的α是一个未知的常数,无法实现反馈线性化。所有要设计控制器实现对这个未知量的自适应。这里有滑模、高增益和高频三种控制。

这个条件更一般,α直接是一个变量,但是已知α的极限值。通过设计控制器使误差滑向dote=-ke这条相轨迹上,实现渐近稳定。

控制器设计的理解:
任何事物都是一个控制系统。只不过各自的稳态特性和动态特性各有不同。为了改变这些稳态特性和动态特性,就对原系统进行改造,使得它们的性能符合期望值,这个改变就是控制器。
以汽车系统为例,“人-车-环境”就是一个系统,在没有电控系统的时候,人就是控制器,新手不会开车,老司机驾驶经验丰富,驾校就是训练驾驶员这个控制器的,这也是现在机器学习的思想,在仿真环境中训练出性能优良的控制器,到真实环境中完成各项任务。但是人仍有缺陷,所有设计了各自电控辅助驾驶系统,力图提高动力性、经济型、制动性、操稳性、平顺性和通过性。

言归正传,下面是非线性弹簧问题的推导过程:
其中,反步法在理论介绍中已经进行了推导
前两张是作者给出的答案




最后的总结可以看出,三种控制都是用了反步法的思想。唯一不同的是根据α是否已知,是否变化,进行了反馈线性化、自适应和鲁棒控制。

下面是simulink仿真分析

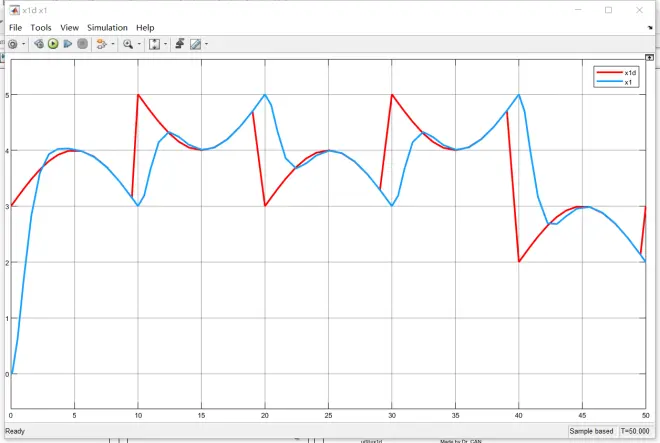




运行几种典型的控制方法进行轨迹追踪的仿真。会得到不错的追踪结果,但是正如前文所说的只考虑到了稳态特性,动态特性并不是很好,有较大的滞后或超调或振动或误差。可以引入目标函数综合考虑各因素,选取合适的k1、k2以及rho
