
转载:论有源相控阵雷达和机载红外成像跟踪系统在应对低可探测威胁的应用
2022年2月,在我一期直播中,我为大家讲解了来自于希腊空军George-Konstantinos Gaitanakis1, George Limnaios2, and Konstantinos C. Zikidis2《论有源相控阵雷达和机载红外成像跟踪系统在应对低可探测威胁的应用》。今天将原文和本人对此的理解分别发出,以飨读者。

Abstract. The radar has been indisputably the most important sensor in the battlefield, allowing early warning and tracking of air vehicles. Modern fighter aircraft employing AESA fire control radars are able to acquire and track targets at long ranges, in the order of 50 nautical miles or more. However, the proliferation of low observable or stealth technology has contested radar capabilities, reducing their detection / tracking ranges roughly to one third. This degradation is more severe concerning fighter aircraft radars, since most stealth threats are optimised for higher frequency bands, as in the case of fire control radars. Hence, other parts of the electromagnetic spectrum have been reconsidered, such as infrared radiation (IR). Every aircraft is a source of IR, due to fuel combustion, aerodynamic friction and IR reflection. In this way, a jet fighter can be detected by an IR sensor against the cold background of the sky. Therefore, IRST systems have re-emerged, offering an alternative to the radar. Apart from their capabilities concerning target detection (whether stealth or not), IRST systems also exhibit passive operation, resilience to jamming and better angular accuracy. On the other hand, they are prone to weather conditions, especially moisture, while they cannot measure distance directly, as in the case of the radar. This work explores and compares the capabilities and limitations of the two approaches, AESA radars and IRST systems, offering also some insight to the benefits of sensor fusion.
论文摘要要点:雷达是战机最重要的传感器,当代战斗机普遍运用AESA(有源相控阵)雷达作为自己的火控雷达,可以满足至少50海里(90公里)或更长距离的搜索跟踪火控能力。但是,在面对隐形飞机目标时,AESA往往会被压缩70%的探测距离。由于机载雷达探测距离严重被压缩,战斗机雷达也开始向更高频率发展(如朝着毫米波波段),同时也在发展非雷达外的探测手段,如红外跟踪手段。由于任何飞机在空气中飞行都会产生明显有别于背景的热源,因此为了追踪隐形飞机,红外跟踪(IRST)又开始被大家发展起来,但红外跟踪明显受到气象条件影响,不能做到全天候下性能一致性,因此有必要对比AESA和IRST分别使用和结合使用下对隐形目标的探测能力的优劣势进行分析。
1 Introduction
Most jet fighters today are equipped with mechanically scanned antenna (MSA) radars, where the beam is steered by mechanically deflecting a planar antenna. Despite the maturity and the decent performance of such radar systems, the conventional gimballed antenna is limited by inertia. Thus, the electronically scanned array (ESA) has been introduced, consisting of a large number of radiating elements, where the beam can be steered by controlling the phase shift individually for each element [1]. Agile beam steering via electronic control of beam direction is the main advantage of ESA over MSA, as it permits flexible control of the beam for tracking individual targets or groups of targets [2]. These antennae are often known as phased arrays and they fall into two categories, passive and active ESA (PESA and AESA), depending on where the power is produced: PESA systems employ a conventional transmitter, based usually on one or two Travelling Wave Tubes (TWT), providing the necessary RF power, and a computer-controlled phase shifter just before every radiating element, while AESA systems consist of Transmit- Receive Modules (T/R modules or TRM), which combine independently controlled transmitters, receivers, and beamsteering controls, usually by phase [2][3]. AESA systems offer significant benefits in terms of beam agility, operational exploitation diversity and reliability. TRMs are based mainly on Gallium Arsenide (GaAs) technology. However, due to the poor thermal conductivity of GaAs, more recently silicon germanium (SiGe) and especially Gallium nitride (GaN) are emerging, with the latter being considered for all advanced AESA development programs [1][4]. Radar systems are challenged by low observable techniques, aiming at the reduction of the RCS (Radar Cross Section). In this way, electro-optical sensors and IRST systems in particular offer significant advantages. However, all available sensors should be taken into account in order to "build" spherical situational awareness. Therefore, multi sensor data fusion is required, for target tracking based on measurements from different sources, avoiding multiple tracks. Every sensor exhibits certain advantages and limitations, while their synergy provides an operationally useful conjunction. In the next section, issues concerning the AESA technology will be discussed, analysing the case of MSA to AESA upgrade and the relevant limitations thereof. Consequently, the IRST potentials will be examined, providing a comparison between radar and IRST against stealth aircraft. Finally, the benefits of the multi sensor data fusion will be discussed.
第一章:研究背景
传统战机雷达通常是MSA(机械扫描雷达,如APG-66的平板缝隙天线机械扫描雷达,N001倒置卡塞格伦天线机械扫描雷达),结构成熟而稳定,但是扫描速度受到机械结构(如万向节和天线重量)影响而受到了局限。为了解决雷达搜索速度和多目标同时跟踪的问题,采用了ESA(电子波束雷达),它通过雷达波的合成原理形成电子波束,又根据发射源的多寡分为PESA(无源相控阵,只有1个功率器件,雷达波发出后分解到分布在阵面的移相器,形成合成波束)和AESA(有源相控阵,每一个雷达表面辐射单元都具备独立的发射和接收电磁波能力,也称为TRM(发送接收单元))。
目前市面上服役的AESA都是砷化镓的(指的是截止2020年北约在内的美国盟友,中国的相控阵材质未知,在航展上曾经展出过氮化镓雷达),砷化镓有很好的开关速度,但是缺陷是砷化镓导热不好,而且高温下容易性能受损,所以提出了更先进的氮化镓技术,欧美下一代雷达预计全面改换氮化镓技术。
当代雷达技术日益受到隐形技术挑战。因为RCS(雷达反射截面)下降了,传统雷达日益难以跟踪隐形飞机,所以IRST和AESA就理所应当成为了反隐形的主要传感器,但是,由于任何设备都有自己的一定缺陷,所以要想解决反隐形,就必须要将所有的传感器通过航电集成为综合传感系统,从而扬长避短,建立起立体的反隐形能力。本文将首先阐述机械扫描雷达和有源相控阵雷达在反隐形上的优劣,接着讲述IRST在反隐形上的优劣,并对比AESA和IRST的比较特点,最后论证综合传感器系统在反隐形上的用途。
第二章:AESA的性能特点
AESA的优势早已人尽皆知(发射功率大,跟踪目标多,多用途能力好等等诸多碾压普通雷达),本文不再赘述。不过,AESA也有价格昂贵的缺陷,最普通的AESA就比最高端的机载机械雷达贵了50%。除此之外,本文还将阐述其他AESA的劣势:
2.1 AESA在视野边界时成像模糊
我们知道,AESA和PESA都是靠平面雷达天线表面小孔释放出的不同相位的雷达波合成产生了指向一侧的电磁波,替代了来回摇摆的机械天线实现了上下左右的扫描。但是由于波合成的特点,在偏离中轴线45度以上的时候,边缘的清晰度就会下降,总体而言,AESA成像效果和目标和己方雷达夹角的COS值呈正相关。而传统机械雷达能够左右偏转60度下仍能够保证较好的边缘视野(PS:所以当代新型号的AESA都配备了两侧的小天线,以满足较宽的视野下的成像精度)。
2.2 有源相控阵雷达的发热问题
我们知道,AESA比起PESA和机械雷达最大的优势就是发射接收单元大大增加了,同时雷达的辐射效率也大幅提高了(文中举例,现在的砷化镓雷达可以将功率增加效率(PAE)提升到40%,氮化镓可达50%以上,而就算是加上所有的雷达其他器件,在砷化镓模块PAE=35%,占空比10%情况下,雷达的总体效率也达到了20%以上)使得雷达辐射功率大幅提高,但是大幅提高的辐射功率也给雷达阵面的冷却带来了巨大的麻烦,如对于上文所述的20%总效率的砷化镓雷达,想要产生1千瓦的辐射能,就需要5千瓦的输入电能,并产生4千瓦的废热(但值得一提的是,相比老式的电子管机械扫描雷达,砷化镓20%的辐射效率已经是非常惊人的)。因此一架飞机能够安装的AESA雷达的上限,往往由它能够提供的冷却系统的能力决定。
2.3 雷达探测目标的公式:
Pm是平均传输功率,Gt和Gr是天线的发射和接收增益,λ是波长,σ是目标的 RCS,Td停留时间,R是目标的范围,k是玻尔兹曼常数,T0接收机的温度,F的接收机 的噪声数字,L的各种损耗和Li集成损失。Ts是系统总温度,Lt是输电线路的损耗,和La双向路径的大气吸收损失。
由此可见,在波长和对方的RCS一致下,探测雷达的功率越高,系统总温度越低,线损和大气损失越小,探测距离也越远。
2.3 以F-16战斗机为例研究机械扫描雷达换AESA
目前,希腊空军装备的F-16C/D主要配备美国APG-68V9机械扫描雷达,该雷达理论上能对RCS=1目标(如B-1B,F-18EF,台风,歼10C这样的现代飞机,而苏27雷达反射面在10平方米以上)达到38海里(约70公里)的探测距离。该雷达输入功率5.6KV*A,通过机械风冷降低雷达温度,雷达冷却机提供降温能力不超过5.6千瓦(即不高于雷达输入总功率)。
F-16的升级型号F-16E/F BLOCK60(中东狗大户有)是最早搭配AESA的F-16飞机,它用的是APG-77简化而来的APG-80雷达,使用1020块砷化镓TR,输入功率可达10KV*A,不过它搭配了APG-77来的液冷装置,使得它能够在10KW功率下运转。相比之下,诺斯罗普格鲁曼在为现存的F-16飞机提供的改装为F-16V的改件APG-83,虽然结构和APG-80相当接近,也有1020块TR,但由于不对F-16自身的风冷系统进行液冷改造,因此它只能以5千瓦功率运转,否则会烧毁。
2.4 比较机械扫描雷达和APG-80(10千瓦液冷AESA),APG-83(5千瓦风冷AESA)探测能力
计算APG-83检测范围的主要参数如下,其他所有参数均设置为默认值,如[13]中 所述:
雷达工作频率:9.5 GHz
脉冲重复频率(PRF):100kHz
脉宽:1μs(为了使占空比为10%)
用于搜索的雷达时间的分数:100%
扫描扇区:120°×11° -
径加权算法:Taylor40dB
停留时间:0.025 s
天气状况:洁净空气
检测概率:90%
误报时间:120s
根据上述推理,APG-83(风冷,5KW)有望提供47nm.针对 1m²RCS的标准目标探测距离。但是由于AESA在45度轴向角度下成像模糊,所以在45-60度下反而不如传统的APG-68机械雷达。将APG-83与它的前身APG-80进行比较,可以注意到,在F16block 60上预计没有这样的冷 却限制(也就是10KW)。因此,保持所有参数如上所述,并只将PRF设置为200kHz,从而将占空比增加到 20%,目标RCS=1的检测估计为64nm。.
第三章 红外跟踪成像系统
红外成像系统是通过红外成像镜头对远处的目标进行成像,由于战机发动机尾焰、飞机飞行摩擦热量影响,使得飞机和背景空气有较为明显温差,尤其是10000米高空巡航时,外部气温可跌到218K(-55摄氏度),使得热成像设备很容易就能把飞机从背景区分出来。因此,红外成像有以下特点:
a.探测范围较长,与目标是否隐形无关。
b.被动传感器,不触发雷达报警器。
c.光学镜头运转不像雷达那样容易被卡住。
d.成像精度好,提供了更精确的角度分辨率
e.另一方面,它们也很容易受到天气条件的影响,尤其是潮湿的天气条件。
f.它们不能直接测量目标范围。需要搭配比例测距或者激光测距完成距离测算。
对典型F-35目标(外温218K,机温255K)的12微米红外传感探测效果如表(翻译后):
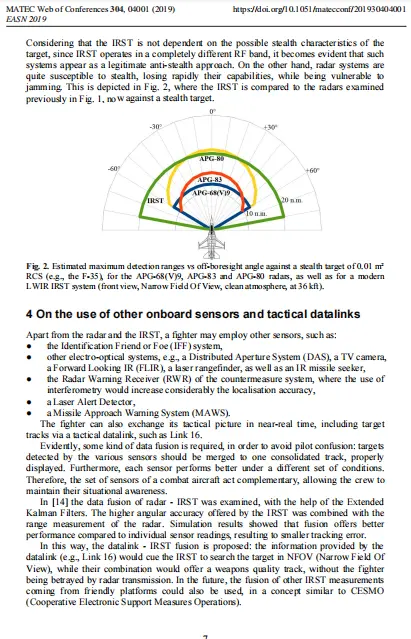
现在对比IRST和雷达对于同一个F-35目标的探测效果(机温255K,RCS=0.01㎡,其他环境和上述雷达环境相同),可得到以下图:
由图可知,由于F-35的雷达截面0.01平方米远低于三代机标准1㎡,因此雷达探测距离锐减了三分之二,传统APG-68V9雷达探测F-35只能在12nm距离实现,F-16V的APG-83虽然是AESA,但是由于发射功率上限受到风冷系统限制,只能维持在APG-68V9的5kw功率,所以最大探测距离仅增长了2海里左右,而且在45-60度角度还不如APG-68V9;APG-80由于功率提升到10KW,对F-35探测能力比起APG-68V9翻倍,达到20nm(约36公里)(PS:根据杨基和PUPU在2016航展对话,这个估计数据和成飞内部歼20和歼10对抗非常接近,歼10在内部对抗时也无法探测到20公里外的歼20)。
IRST探测F-35时,有效的跟踪距离和角度无关,在整个前向视野(约150度)内都可以达到20nm。不过由于IRST受限于环境因素,并不是任何天气都可以达到这个探测距离,而且搜索速度和刷新率远低于AESA。
第四章:综合传感器和数据链结合使用
除了AESA和IRST,还有一些设备可以用于侦察隐形飞机:
1、敌我识别器(IFF):在敌我识别器扫到敌机时,敌机回复的敌我识别信号可有助于预警敌方飞机接近,哪怕是隐形飞机在不关闭敌我识别器情况下,也会在被雷达扫到时自动回复自身代码而暴露自己。
2、分布式孔径系统(DAS)、电视摄像机、正向红外(FLIR)、激光 测距仪,以及红外导弹导引头,这些装置往往不是用于专业对空搜索,但是也可以感知隐形飞机。(大部分都是对地武器)
3、雷达报警机,被敌方锁定时可以反向测量敌方位置。
4、激光报警器,在敌机试图使用激光测距仪展开打击时可以确定敌方位置(SU-27在静默接近时,IRST末端需要开启激光测距仪才能确认敌机参数)。
5、导弹逼近告警,被敌方导弹攻击时,可以反推射击方的位置。
6、可以利用LINK-16这样的数据链从其他友军飞机获取敌方情报。
显然,单一的探测系统不但有不少缺陷,而且还容易产生误判,那么通过先进的电子系统将飞机所有传感器结合,并统一汇总分析计算出具体目标特征,其真实度更高,更有助于识别和锁定隐形飞机。
5、结论
AESA技术具有显著的优势,导致了传统的机械扫描雷达(MSAs)的逐步淘汰。然而, AESAs产生大量的热量,特别是如果使用老一代砷化镓发射/接收模块时,因此,在雷达 从MSA升级到AESA的情况下,如果飞机冷却能力有限,平均雷达传输功率将必须相应地受限制。同时,即使考虑到在高离角度的扫描损失,对传统MSA雷达的AESA升级将提供一定的边际效益,特别是对隐形飞机能够提升一些探测距离加成。
IRST系统似乎是一个相当有前途的替代方案,提供足够的探测范围,甚至能对抗隐身威胁,同时不泄露自己的雷达信号,免疫射频干扰。IRST可以与数据链结合,来满足对武器发射的火控需求(如利用IRST数据控制雷达制导导弹飞行)。复杂的现代战争要求所有机载传感器和战术数据链的数据融合,允许飞行员在所 有条件下保持立体态势感知。
