
【机器人基础】Introduction to Robotics@UCB

在看的小伙伴不要被前面几个视频劝退,P4以后的声音和视频都很好,而且教授改用了手推定理的方式,讲的很好。
Chapter2: rigid body motion
2.2 rotational motions in R3
property of a rotation matrix: orthnornal
rotation matrxi in invitable since the rank is 3 (full rank)
Since orthormal, R-1=RT
(detR)^2=detR*detRT => 1 => detR = +-1
SO(3): othonormal matrix with deg 3 -> a group
group: g1*g2 in G (closure under multiplication)
exists a identity element
all elements have an inverse
Examples of group
R3->addition operation: is a group
0 vector: identity
inverse: negative
(0,1) mod 2 addition
identity: 0
R, multiplication
inverse: 0 does not have -> not group
Property: SO(3) is a group with matrix multiplication
R1*R2 is in SO(3)
identity: I
inverse: RT
Configuration and rigid transformation:
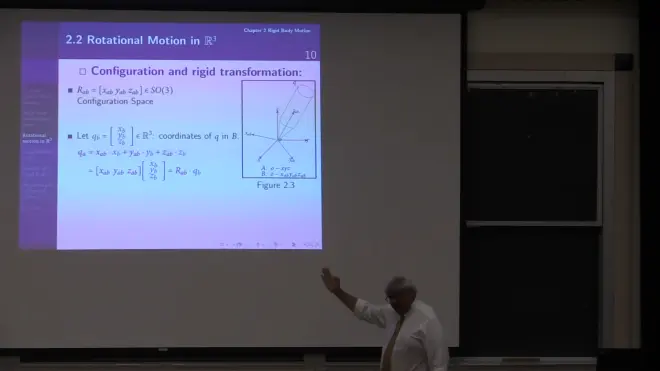
property 2: Rab preserces distances and cross product
R(vXw)=RvXRw
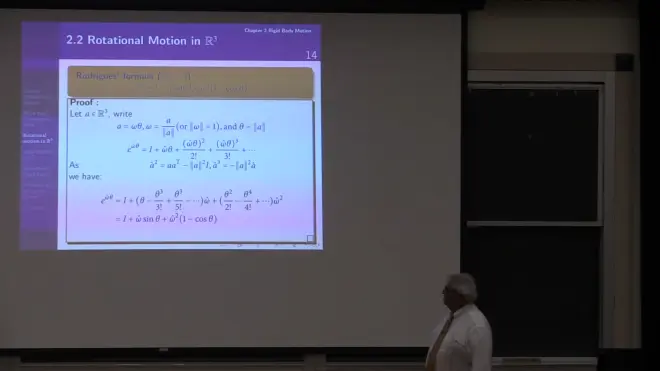
Euler's formula
euler formular for SO(3)
every rotation is a exponential of something
skew symmetric matrices: odd dimention...
9 numbers: only 3 indenpendent parameters
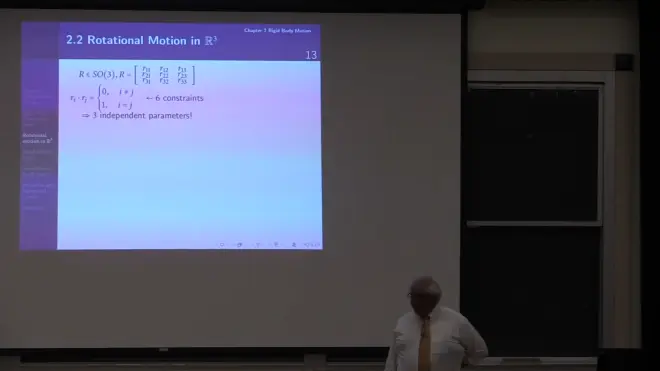
figure what are the 3 parameters
omega_hat is so(3),
hat: R3->so(3), i.e., omega-> omage_hat
exp: so(3)->SO(3), omega_hat*theta->exp(omega_hat*theta)
exponential of a skew symmetric matrix is always a rotational matrix
Rodrigues' formula
product of two skew sym matrix, is sym
