DCS F-14 开发日志 - 惯性惯性还是惯性!
2018/09/04 开发日志补翻
原文地址:https://forums.eagle.ru/showthread.php?p=3447237#post3447237
译者吐槽:众所周知 DCS:F-14B 中,飞行手册的总体设计部分其中一大半都在介绍 INS 导航,几乎是1:1还原了真机中导航系统的工作方式(TARPS 目前还未加入游戏),如果你对 F-14 的导航感到迷惑的话,希望这篇往期的官方开发日志文章能够更好的帮助你理解游戏中(也许)最具深度惯性导航模拟!
PS:手册复读内容已用 * 号进行了标注,如对导航的理解感到自信,可以跳过这篇文章(本质上是对手册的一点补充,更详细的请查看手册:https://kaidrick.github.io/DCS-F-14-Flight-Manual-zh-CN/)。那么废话不多说,开始我们本次文章!
亲爱的玩家们,
如前所述;我们的主要目标为尽可能完整地将 F-14 模组发布出来。其中我们将完全筹备好的一个大项目就是导航系统,尤其是新的惯性导航系统模拟。导航系统与其他原件例如 TID 和 CAP 密切相关,以后我们将会在这方面进行更详细的介绍。
享受由 F-14 开发人员 Krzysztof Sobczak(物理学教授)撰写的与下方导航系统相关的专业和物理学更新!
引言
*一架好的战机应该能为机组乘员提供导航,而无需外部导航辅助或引导。实现这一目标的方法就是为飞机装备惯性导航系统(INS)。INS 通过测量惯性力(即加速度)以及旋转时的角速度并对其积分以计算飞机的位置以及线速度。一套良好的导航系统可以精确地引导飞机前往数百或数千英里外的任务目标,然后安全、可靠地返回到基地。当飞机被设计为在远离地面塔康台和目视参考点的大洋上执行任务时,这样的导航系统显得更加重要。
F-14 中所使用的 INS 为 多装置 舰载机惯性导航系统(CAINS)。你或许以及发现,本次开发介绍的中心正是此系统。
AN/ASN-92 特性
AN/ASN-92 INS 是 F-14 中的主要导航系统,为机组和其它飞机系统提供:
当前经纬度
姿态
真航向和磁航向
本机的地速和地面航迹
存储和显示三个导航点,固定点(FP)、起始点(IP)、地面/水面目标(ST)、基地(HB)、防御点和敌对区域的能力
距离,方位,指令航线,指令航向和到所选目标的剩余时间
计算出的风速和风向
计算出的磁差
连续监测设备状态,并在发生故障时通过注意灯灯和在 TID 上显示失效部件对应的的缩写来通知机组的能力
部分系统失效后的备用导航模式
*尽管对于机组来说,INS 主要用于导航,但其对其他机载设备的正常运行也是必不可少的。例如,雷达就需要从 INS 获取飞机的姿态。一些武器投放模式(特别是那些长距离投放模式),需要获取姿态以及本机位置信息。更令机组痛苦的是,INS 的完全失效使得例如 AIM-7 或 AIM-54 的某些高级模式无法使用。
*同样的信息也被用于数据链路的运行——当使用错误的 INS 数据时,从友机接收的本机航迹以及目标信息将无法匹配,并且将导致 TID 显示错误的目标。以上的情况只是一些例子,每当飞机系统需要用到飞机姿态和位置数据时,这些数据均取自 INS 系统。
构成和运作原理。
AN/ASN-92 由多个部件所组成,但是有两个组成为系统核心的特殊部件:惯性测量装置(IMU)和导航计算机。
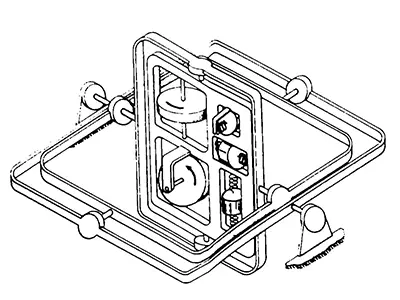
*IMU 是一个三轴、三环式、全姿态单元,包含有两个陀螺仪和三个加速度计。陀螺仪和加速度计安装在相对于基座(飞机)可以自由旋转的平台上。平台的四环架系统赋予了平台自由旋转时不被环架锁定的能力,并能够使用力矩电机来修正平台姿态误差。陀螺仪测量其敏感轴的旋转角度,并且是有关飞机姿态信息的数据源。它们还负责稳定整个平台并保持加速度计相对于地面(重力)的垂直的方向。两个加速度计负责测量水平方向的加速度,而第三个加速度计负责测量垂直方向的加速度。加速度计的敏感轴相互正交。力矩器线圈能检测质量块的轴向位移并产生一个放大信号,这个信号然后发送给力矩器,将质量块恢复到零位。当前所需的力矩大小和加速度成正比。测得的加速度信号在计算机内进行积分,并用于从起始点计算飞机的速度和位移。平台的姿态也不断修正来消除地球自转和设备误差相关的影响。
*这样的设计被广泛用于平台式惯性导航系统。除了用于 F-14 外,还用于航天飞机和许多当代的其他飞机。 在下方,您可以从 JA-37 飞行手册中找到 IMU 的草图——这个模型与 F-14 所使用的几乎一致。
*像 AN/ASN-92 这样的 INS 设备需要对加速度和姿态进行高精度测量,因为即使最小的误差也会在长时间累积后导致明显的误差。
*举一个例子:惯性平台从标称位置略微倾斜,比如说,0.002°。然后,水平加速度计不再与地面平行,这意味着它们容易受到重力影响。如果不修正,则导航计算机会将重力分量误认为水平加速度。如果错误的姿态保持一小时,将导致超过一海里的位置测量误差。这样巨大的误差正是由最小的对准误差造成的。
*INS 的精度会随着时间的推移而降低——通常它们在导航模式下运行的时间越长, 累积的误差就越大。

INS 对准程序
INS 设备在准备好导航前必须先准备好。这个过程我们将其称之为【对准】。在对准开始前,RIO 必须输入飞机的坐标和高度。
选择了对准模式后,对准子程序将被读入至计算机中并且第一阶段——粗对准——将会开始。
*第二阶段——精对准——使用陀螺仪漂移的精确测量值来计算飞机的真航向。由于地球的自转,这是可能的。对准不会使用磁航向,并且整个过程仅依赖于测量 3D 空间内平台的非惯性运动。
岸基作业来说,整个对准过程应该在8分钟内完成。飞机可以在地面预先进行对准来进行快速反应。这样可以将对准的时间缩减至2分钟,但这要求飞机系留在警戒位置。
对于舰上来说,由于母舰在不停的移动,所以舰上对准比地面对准稍微复杂些。因此,为了支持该(对准)过程,舰船 INS 数据将通过数据链路或甲板边缘的线缆传输到飞机。舰上对准过程应该在10-12分钟内完成。如果舰船的数据无效,那么舰船的真艏向和航速可由 RIO 手动输入。
性能
按照海军规范的需求,在北纬45°(注:为什么在北纬45度?https://zh.wikipedia.org/wiki/%E6%A8%99%E6%BA%96%E9%87%8D%E5%8A%9B),完全对准后的 AN/ASN-92 INS 应该具备以下性能。
航向 3 弧分。(注:误差)
俯仰和滚转 2.5 弧分。
0.75海里/小时的位置误差率。
3英尺/秒的垂直误差
所有值都表示标准偏差,并假设误差为正态分布。
在完成粗对准标准后,RIO 可以决定在任何时刻完成对准并切换至 INS 导航模式。但是,过早的选择导航模式将会显著降低导航质量。
F-14 INS 无法在空中对准。如果在空中 INS 失效或没有正确 INS 对准就起飞了,那么你可以使用两种备用导航模式。这两种备用导航模式通过从 IMU 或 AHRS(姿态航向基准系统)获取的姿态信息,CADC(中央大气数据计算机)中的空速,存储的风向风速数据和磁差来提供航位推算。
RIO 可以通过更新飞机位置来提高(恢复)空中 INS 的精度:
使用雷达锁定一个已知的参考点(航路点)。
通过 TACAN 信号和将已知的 TACAN 台坐标存储为航路点。
通过飞跃目视参考点。
使用数据链路,当飞机在密集编队或选中一个雷达锁定(合作的飞机)。
在空中更新飞机 INS 位置可能会引入比更新前更大的误差,并且更新位置所使用的方法的精度也限制了更新的准确性。因此,当导航稳定性显著降低时,机组应该使用备用导航方式时才会有大的用处。
仿真
*设计一套 INS(IMU)是一项有挑战性的工作,工程师需要全面考虑各项问题,如校正、对准、地球自转、惯性力、热稳定性、数/模转换器精度、各种类型的校正以保证设备长时间运行后依旧保持精度,以及更多需要考虑的问题。模拟一套 INS 系统是也很相似——这也不是什么轻松的活。
*在 Heatblur ,我们决定开发一套全新的数学模型来模拟我们 F-14 的 AN/ASN-92。模型包括了所有导致设备最终精度偏差的潜在误差源,并重建了一个三环式三轴 INS 平台的特性行为。这一系列下来的结果是一组算法可以在 DCS 中真实还原 AN/ASN-92,但经过优化之后却能够做到几乎不影响 CPU 性能。
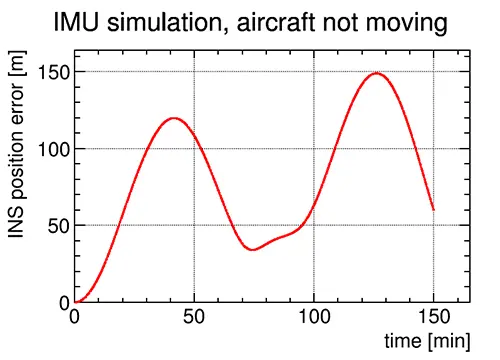
由于下面的图片等价于1000个单词,因此为了方便,你可以直接查看下方我们对 AN/ASN-92 仿真测试运行的结果。
该图中,飞行已停放,IMU 的初始失准为 0.0005 度,即,非常低。图中代表 INS 计算出的位置误差随时间变化的幅度。如您所见,变化是不定的,在某些时刻误差的幅度会减小。这种震荡行为是已知的一种效应,由德国工程师马克西米利安舒勒提出(舒勒调谐)。理论上这个震荡预计的周期为84分钟。在我们的建模中,这些震荡是在仿真物理过程中的自然的产物。最后,正如您所见,飞机不必移动来积累 IMU 误差。
从功能的角度来看,我们对 AN/ASN-92 的仿真是真实的模拟真实装置,并包含了上述所有功能。它们其中大多数已经实装,最后缺失的功能将会在接下来的几周内就完成。
可以期待你的 INS 将会:
将您导航至任意目标点
漂移和并不是100%的准确
与其他飞机系统通信并仿真 INS 的一些误差会影响其性能
需要正确对准
如果在任务编辑器中选择了对应的复选框,使用预存航向对准方法来减少对准时间至2分钟。
有时会失效,迫使您使用备用模式。
飞行测试结果
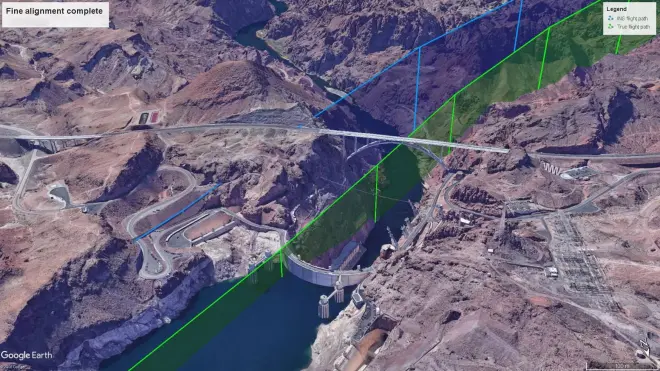
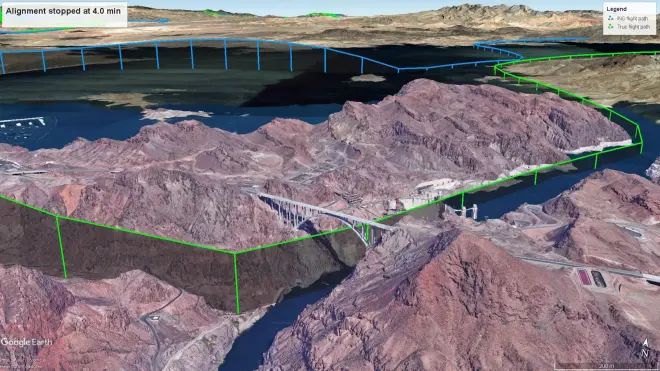
结束本次更新内容,我们想向您提供我们在 DCS 中驾驶 F-14 进行的两次飞行测试的记录。我们从内利斯空军基地起飞,爬升至12000英尺,飞向克里奇,贴地飞行然后飞向古鲁姆湖。在古鲁姆湖上进行一次“zoom climb”(注:术语https://en.wikipedia.org/wiki/Zoom_climb)后,我们下降回到地面高度接着直线飞向米德湖,穿过米德湖至胡佛水坝,飞跃博尔德市,然后返回内利斯基地。整个线路大概花费近40分钟。
在飞行前,我们将 INS 对准至“精对准”状态——消耗了大约8分钟时间。第二次飞行前进行了部分对准,在对准了4分钟后停止对准。



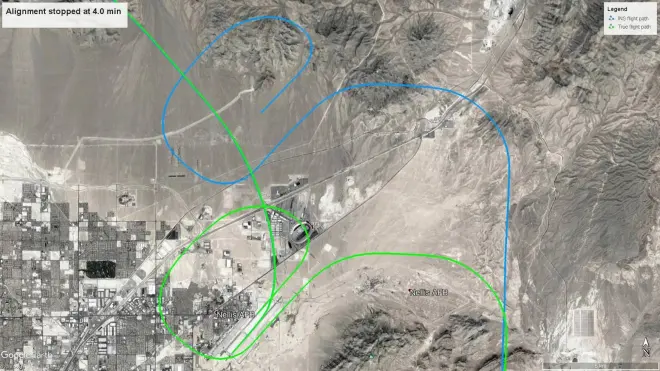
我们将数据导出并加载至谷歌地球中,并准备了真实飞行路线与 INS 测得的飞行路线的图形对比。
完全对准情况下,计算出的 INS 位置的误差在飞行的末尾时与真实的飞行路径误差有0.4海里,而4分钟对准则有4海里。
如果你想细看结果,你可以下载记录下来的飞行路径并在谷歌地球中打开来查看:
精对准:https://drive.google.com/open?id=1yI...qvBaA6hnUHwDQx
4分钟对准: https://drive.google.com/open?id=1Bx...M3ZHA6QqRaxZKE
感谢您耐心地阅读!
当我们在更细致地探究在 F-14 导航系统的实际使用时,我们将在下一个开发更新中会返回 AN/ASN-92。
一如既往,感谢您的支持!
诚挚的,
Heatblur Simulations