
颠覆多机器人SLAM的鲁棒、分布式、稠密度量语义创新!
以下内容来自小六的机器人SLAM学习圈知识星球每日更新内容
点击领取学习资料 → 机器人SLAM学习资料大礼包
#开源#TRO2022 Best Paper Award|Kimera-Multi:面向多机器人系统的鲁棒、分布式、稠密的度量语义SLAM
Kimera-Multi: Robust, Distributed, Dense Metric-Semantic SLAM for Multi-Robot Systems#论文#
作者单位:麻省理工学院SPARK LAB实验
开源代码:GitHub-MIT-SPARKKimera-MultiIndexrepoforKimera-Mul...
文章链接:210614386Kimera-MultiRobustDistributedDenseMetric-...
demo链接: https://youtu.be/G7I3JubdU8E
摘要:
多机器人实时定位与地图构建( Simultaneous Localization and Mapping,SLAM )是在大范围内获得及时态势感知(situational awareness)的重要能力。现实应用要求多机器人SLAM系统对感知偏差(Perceptual Aliasing)具有鲁棒性,并能在有限的通信带宽下运行;此外,这些系统还需要捕获语义信息,以实现高级决策和空间人工智能。
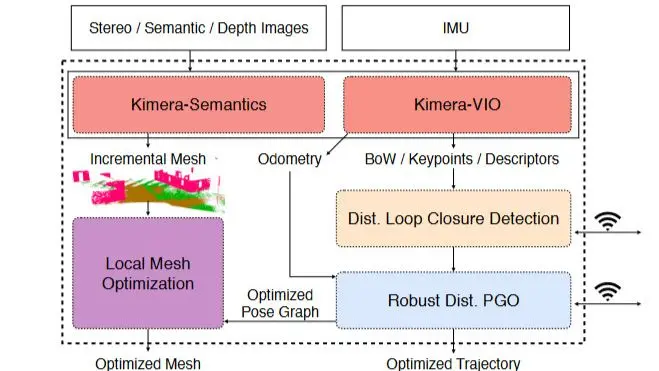
本文提出了一种多机器人系统Kimera - Multi,该系统( i )具有鲁棒性,能够识别并拒绝由感知偏差导致的错误的机器人间和机器人内的闭环;( ii )完全分布式,仅依靠局部(P2P对等)通信实现分布式定位和建图;( iii )实时构建环境的全局一致性的度量-语义三维网格模型,其中网格的面标注有语义标签。Kimera - Multi由一队配备视觉-惯性传感器的机器人实现。每个机器人使用Kimera建立局部轨迹估计和局部mesh。当通信可用时,机器人会发起基于分布式渐进非凸算法的分布式位置识别(place recognition)和鲁棒位姿图优化协议。所提出的协议允许机器人利用机器人之间的闭环来改善其局部轨迹估计,同时对异常值具有鲁棒性。最后,每个机器人使用改进的轨迹估计来矫正基于网格变形技术的局部mesh重建。
本文展示了Kimera - Multi在真实性渲染模拟、SLAM基准数据集和使用地面机器人收集的具有挑战性的室外数据集的性能。真实场景下和仿真场景下的实验均涉及长轨迹(例如,每个机器人可达800米)。实验表明,Kimera-Multi ( i )在鲁棒性和准确性方面SOTA优于现有技术;( ii )在完全分布式的情况下实现了与集中式SLAM系统相当的估计误差;( iii )节约了通信带宽;( iv )生成了精确的度量语义三维网格mesh;( v )是模块化的,也可用于标准的三维重建(比如没有语义标签)或轨迹估计(比如无需重建三维网格)。









以上内容来自小六的机器人SLAM学习圈知识星球每日更新内容
