
空中机械臂的发展概述
空中机械臂的发展概述
一、介绍
空中机器人与环境的物理交互领域,特别是空中机械臂,经历了十年的持续发展。在具有代表性的室内和室外场景中,已经开发和评估了各种原型、功能和能力,证明了在飞行中成功执行操纵任务的可能性。近年来,空中机械臂快速到达高空并进行操作的能力,以及其成熟程度的提高,使得该技术在检查和维护等领域得到了应用,为人类工人减少了时间、成本和风险。
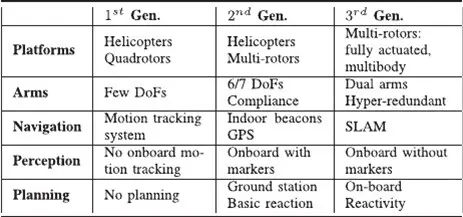
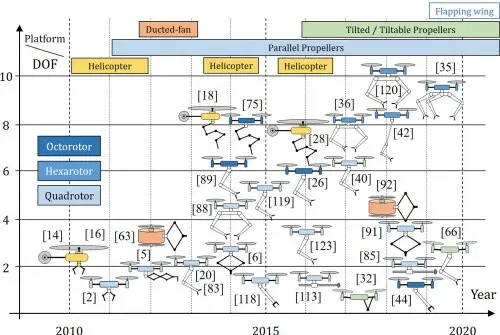
回顾这一领域的主要成就,提炼出共同特征,在表1中定义了三代空中机械臂,在图1显示了近十年来空中机械臂设计的演变。
第一代空中机械臂由传统的四旋翼组成,能够在保持飞行稳定性的情况下向墙壁施加力,抓取物体,具有很少的自由度(dof)。此外,还有使用涵道风扇无人机和直升机作为机械臂的空中载体的原型。然而,多旋翼的控制、机械结构相对简单,更受青睐。
第二代空中机械臂包括适用于室内和室外操作的空中平台,配备了刚性和柔顺的手臂(多达6 到7个 自由度),用于精确的末端执行器定位和扰动补偿;还集成了基于全球导航卫星系统(GNSS)的户外导航传感器、基于信标的室内导航等功能。
目前的第三代空中机械臂包括几个先进的功能:户外/室内环境操作,全驱动平台,多臂,GNSS自主导航能力,机载SLAM。应用包括结构装配,炼油厂(管道和储罐)的接触式检测,桥梁等。
二、空中操纵平台
在前文中,我们根据结构设计上的不同,将空中平台分为直升机、涵道风扇无人机以及最流行的多旋翼平台。接下来,我们将根据驱动特性、交互类型和执行的任务重新进行分类。
A、建模和驱动特性
在之前的推文中,我们介绍了什么是全驱动无人机。同样的,我们也考虑一个的多旋翼平台,其执行器,由一个电机螺旋桨对组成,在机体上产生推力和阻力矩,共有n组。收集了相对机体的所有控制输入,得到总的力/力矩的分配矩阵M,由此可以根据分配矩阵的秩分为以下几类空中平台。
1) 单向推力(UDT): 具有该特性的平台只能沿一个方向改变总推力(如共面/平行设计,直升机和涵道风扇)。如果一个平台的分配矩阵是rank M =4,我们就说它是UDT。对于直升机和涵道风扇无人机,之前的模型并不直接适用。一般将总推力和总扭矩视为输入。由于推力方向是恒定的机体框架,因此相应的分配矩阵rank M=4。
2) 多方向推力(MDT): 具有这一特性的平台可以独立于总力矩沿多个方向改变总推力。如果5≤rank M≤6,则平台为MDT。
3) 全驱动(FA): 这是MDT平台的一个子类。具有这一特性的平台可以独立于总力矩沿各个方向改变总推力。如果一个空中平台的分配矩阵rank M = 6,那么它就是FA,这与我们前面关于全驱动无人机的推文中的定义一致。
4) 过驱动(OA):控制输入数多于输出数。如果一个多旋翼是FA,那么它就是OA,并且一个所需要的wrench有不止一个输入组合来实现它,即n > 6。
5) 全向(OD): 这描述了FA设计的另一个子类,不排除OA。
B、 非接触式任务的控制方法
如果平台是FA,控制器的设计是相当简单的,因为全分配矩阵M是可逆的。这允许应用简单的静态(固定螺旋桨)或动态(可倾斜和可移动螺旋桨)反馈线性化,允许独立控制位置和方向。如果平台为OA,可以利用M的零空间对控制输入进行优化。
如果平台不是FA,反馈线性化不能直接应用。针对欠驱动,需要设计一个特定的控制器。对于四旋翼机和直升机,为了应用动态反馈线性化,需要考虑总推力和力矩作为输入的第一输入变换。
其他可以独立应用于FA和非FA平台的通用方法是基于模型预测控制(MPC)的。这需要一个精确的系统模型,以及成本函数的微调。在实际应用中,由于系统的复杂性,这两个需求都很难得到满足。在这种情况下,反馈线性化可能更容易实现,特别是在静态情况下。
C、空中物理相互作用的控制方法
当飞行器与环境相互作用时,需要能够同时控制接触点的位置,以及相互作用的力,保持飞行器的稳定性。
常见的控制方法如下:
1) 阻抗/导纳控制: 是基于交互点上系统阻抗/导纳力学特性的重塑最常见的方法。阻抗/导纳控制器建立了末端执行器位置与交互力之间的理想动态关系。
阻抗控制,将系统视为机械导纳。系统的输入是由机器人驱动的力,输出是末端执行器的位移。在实践中,为了执行基于接触的任务,末端执行器的期望位置被选择在交互面的“内部”。试图到达这一点的机器人会产生一个力,这个力与控制器的阻抗特性有关。这种策略已经被提出用于欠驱动和全驱动空中机器臂。
导纳控制是阻抗控制的对偶,它将系统视为机械阻抗。对于欠驱动和全驱动空中机器臂,系统的输入是末端执行器的位移,输出是相互作用的力。
2 )位置/力混合控制: 此前的方案采用间接力控制,通过设计合适的末端执行器轨迹来间接控制交互力;位置/力混合控制方法的目标是直接精确地控制相互作用的力。该机器人由两个互补的反馈环控制,一个是位置反馈环,另一个是相互作用力反馈环,分别沿无约束轴和约束轴进行控制。
总结上述两种方法,阻抗/导纳控制器是非常容易和直观的实现。从非接触式和接触式飞行的过渡可以很容易地处理增益的平稳变化;但是,不能保证精确的交互控制。位置/力混合控制器可以提供精确的位置和力跟踪,但必须小心处理接触约束。
D、 物理交互任务
考虑涉及环境和空中机械臂之间力(或力矩)交换;物理交互任务可以简单分为以下几类。
1) 抓取和放置: 目标是抓取或释放一个不受环境限制的对象。这种相互作用只在抓取和放置作业中起作用,通常时间很短,在大多数情况下可以忽略不计。
2) 点接触: 目标是保持环境和机器人末端执行器在单个静止点上的接触。如果末端执行器的位置受到约束,则挑战在于控制相互作用力的大小和方向。另一方面,如果末端执行器可以自由移动,那么挑战是多重的。
3) 拉/推: 这个任务类似于点接触,但交互点是非静态的。相互作用曲面不受完全约束,可以在空间中沿一定方向移动。当机器人被要求拉动一个物体时,末端执行器的位置(也许是方向)通常被约束在交互点上。另一方面,当要求机器人推动物体时,只要作用力位于摩擦锥内,末端执行器与物体之间的机械约束就不需要。对于拉/推任务,额外的挑战是需要考虑对象的动力学,以及它的运动学约束。经典的推拉任务如:打开/关闭一个抽屉或一扇门。
4) 滑动: 目标是当末端执行器在静止表面上运动时,保持末端执行器与静止表面的接触。在控制问题中必须考虑静动摩擦,以避免滑移,保证接触,并使末端执行器沿期望轨迹运动。最流行的应用是对罐体、管道和其他表面的连续接触检测。
5) 插孔: 目的是将一个物体(附在末端执行器上)插入一个孔中。如果物体和孔的尺寸差很小,这个操作就会变得非常困难。在插入过程中,末端执行器的许多自由度受到约束。这既需要对环境的精确了解,也需要适当的阻抗参数来应对实际应用中的误差和不确定性。如果阻抗参数没有处理好,高频振动和共振效应可能导致机器人不稳定或损坏。
6) 操纵: 这一类任务包括所有需要施加特定力和力矩的操作。例如弯曲一根管子或一根棒子。
三、带机械臂的空中平台
A 、空中机械臂的形态
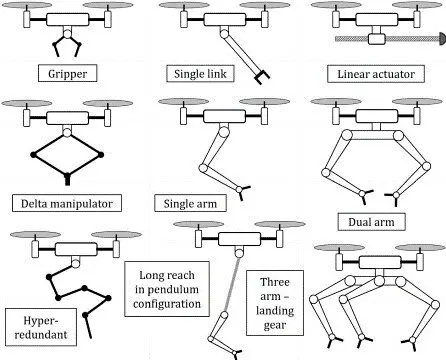
由于工业机械臂的广泛使用,大量的空中机械臂原型机采用了上臂前臂配置,包括肩膀、肘关节和手腕关节。关节的数量和手臂的运动学配置原则上是由操作任务中所需的灵巧程度决定的,从而最小化执行机构的数量以减少总重量。冗余度和超冗余度机械手用于在与物体或环境交互时执行需要末端执行器适当定位和姿态的任务。
B 、柔顺
机器人操作中的柔顺可以定义为机械臂在与环境(人或机器人)的物理交互过程中适应产生的力的能力。直观上,这个概念与关节或连杆的弹性行为有关。更正式地说,柔度可以表述为机械阻抗(或类似地,导纳),它将机械手的位置偏差与外力联系起来,由惯量、阻尼和刚度表征。
由于与机械臂的动态耦合可能会影响漂浮基座的稳定性,因此对于与环境物理交互的空中机械臂来说,柔顺性是非常理想的特征。
C、设计
虽然机械臂应该提供足够的灵巧度来完成任务,但增加机械臂的关节数量会带来一些问题。最明显的是空中平台的有效载荷能力和飞行时间的减少。
为此,空中机器人的设计中应采用不同的方法来解决不同问题。
1) 由有效载荷决定的设计: 使用空中机器人完成包括抓取,安装,或与预定义重量的设备进行交互的任务。如果用户要求使用特定的空中平台,则机载系统的重量和有效载荷受电机的限制。例如,出于安全原因,可能会规定空中机械臂的最大总重量或最大尺寸。
2) 由灵巧度决定的设计: 关节数的设计是为了获得完成任务所需的操作灵巧度。可以区分使用关节进行末端执行器的定位。插入操作和装配操作是需要关节来确定手腕方向的例子。
D、单臂或双臂
在过去的十年中,大多数空中机械臂原型机都考虑将一个操纵器连接到飞机上,只有少数研究了使用两个或三个臂。通过使用相同的手臂,简化了平台上的集成,并可以使用类似肩膀的机械接口将手臂与平台连接起来。
双臂系统的灵巧性和操作能力允许实现单机械手无法完成的任务。长物体的抓取和操作,如棒或管是一个明显的例子,其中双臂操作器的结果比单臂更方便。其他的例子有:阀门回转,双手协同抓取,以及一些装配操作。多臂系统增加了有效载荷能力,扩展了有效工作空间,并允许使用另一臂来部分抵消由一只手臂在空中平台上引起的力或力矩。
E、控制
从整体上看,空中平台和机械臂的控制能力决定了空中系统的功能和潜在应用。
控制的思路主要有以下几种;
1) 解耦: 这些方法将飞行器和机械臂视为两个独立控制的子系统。假设机械手对航空平台姿态和位置动力学的影响相对较小。动态耦合被忽略或至多作为一个干扰来补偿。这激发了低重量和低惯量空中机器人的设计。解耦控制方法只有在准静态运动时才能达到最佳效果。一旦运动在加速方面要求更高,这些方法就会失败,或者在最好的情况下也会显示出很大的跟踪误差。
2) 耦合: 这些方法将系统视为唯一实体。耦合控制方案的设计依赖于完整的动态模型,该模型通过惯性矩阵明确地考虑了动态耦合。因此,该方法更适合于动态情况,在位置精度和稳定性方面有更好的性能。
3) 部分耦合: 空中平台和机械手的控制是独立的,但控制器利用每个系统提供的信息来估计交互力/力矩,并提高复合的性能,通常是在定位精度方面。
4) 基于解耦的平面度: 该方法介于解耦和耦合方法之间。每个自由度都是独立控制的,就像在解耦控制器中一样,但整个系统动力学是通过前馈项来考虑的。
F、 空中协同操纵
为了处理单个空中机器人无法处理的过大或过重的物体,提出了协同操纵的概念。一个由多个空中机器人组成的团队被部署来运输和操纵一个共同的物体,同时通过它们的合作增加总载荷或臂长。
主要有以下几个研究方向:
方向一:多个多旋翼机或直升机的悬索运输和操纵。
方向二:将多个多旋翼直接或刚性连接在一个物体上,并将其用作分布式执行器来运输和操纵该物体,从而克服单个空中机器人的局限性,同时保持机械简单性。
方向三:混合部署空中和地面机器人以利用其互补能力的结果。
四、 空中机器人的新一代
A. 挑战
(1)飞行时间和航程
大多数空间机器人目前的飞行时间为分钟或几十分钟,这对于许多实际应用来说太短了。飞行时间的增加涉及到空中平台的新配置、新能源甚至新的控制和运动规划方法。一些应用还需要增加范围,包括超出视觉视线的飞行,这也意味着遵守法规和安全规范。
(2)与人和物体互动的安全性
多旋翼和直升机的螺旋桨的对靠近空中机器人的人员和贵重物品构成威胁。这对于空中协同操纵等物理交互应用尤其如此。因此,有必要开发更安全的平台和新技术来提高安全性。
(3)精确度
空中机械臂的精度取决于定位传感器的精度,并且受到不可避免的扰动的限制,例如阵风和附近表面的空气动力效应。其中一些影响可以建模和控制,但其他影响很难,尤其是在轻型飞机机载能力有限的情况下。
(4)可靠的决策自主性
当前的空中机械臂通常需要人的监督。通过考虑所有故障源和应急措施,提高决策自主性应涉及高可靠性。此外,各种挑战之间也存在交叉效应,例如,决策自主性的增加需要较高的机载计算能力,而这些能力受到有效载荷最小化的限制,以增加飞行时间和距离。
B.、解决方法
(1)能源
从节省能源的角度,可以考虑像鸟一样停留在树枝上,也可以考虑设计成混合式空地平台,还可以考虑使用混合固定/旋转翼平台等。
停留:大多数有关空中操纵的研究工作都假定操作是在飞行中进行的。然而,在某些情况下,机器人可以停留在支柱或电缆等支撑结构上,以避免能源浪费并延长操作时间。
混合式空地平台:空中运动比地面运动需要更多的能量,混合式空地平台可以飞到地面、陆地无法进入的地点,最后从地面或附着在静态表面执行任务。这节省了能源并增加了操作时间。
混合固定/旋转翼平台:这包括将固定翼(长飞行时间和航程)和旋转翼(垂直起飞、着陆和悬停)的有益特性结合在一起的空中平台。
变形和仿生方法:其中包括以鸟类和昆虫为灵感的配置。特别是,变形技术可以应用于在低阻力配置(通常在固定机翼中)和高升力配置之间进行切换,以避免低速失速甚至悬停。研究表明,拍打飞行比旋转翼飞行效率更高。节能的关键是滑翔和扑翼的最佳组合。然而,到目前为止,扑翼平台还没有被用于空中操纵。
(2)安全性
它涉及信息处理和物理交互。前者与态势感知相关,包括用于碰撞检测和避免的环境感知。后者与空中机械臂与人类的物理交互有关,例如,在高空提供工具或帮助操作任务。
(3)精确度
考虑对气动效应进行建模和控制,以提高空中机械手自由飞行的精度。气流的感应、控制频率的增加,也可用于消除扰动并提高精度。由于很难消除所有扰动,另一种策略是在停留或用另一只手臂固定支撑的同时操纵环境。
(4)决策自主性和可靠性
自主功能实现的复杂性与环境条件有关,同时标记的使用有助于自主感知。然而,照明条件的变化(通常在室外)起着重要作用。另一方面,扰动是不可避免的,需要根据对环境的感知提供反应。
在操纵操作期间,外部扰动很可能会产生碰撞。通过柔度可以大大降低这些碰撞的影响。然而,柔度会降低精度。因此,自适应柔顺应该是未来空中机械手的一个特征。
决策自主性与机载传感、驱动和计算能力有关。然而,实现这些功能的硬件受到重量和能耗的限制。未来的处理器将支持该实现。
参考文献
【1】Ollero A, Tognon M, Suarez A, et al. Past, present, and future of aerial robotic manipulators[J]. IEEE Transactions on Robotics, 2021, 38(1): 626-645.
