
台风飞行手册节选翻译:28 导航计算机、塔康与通信系统(上)
导航计算机(1B-B-34-64-00-00A-043A-A第005版)
导航计算机(NC)是导航系统的组成部分。其主要目的是根据所选导航模式计算最佳导航数据。计算了导航转向参数和一般导航数据。
NC还管理和控制航空电子和攻击串行数字数据总线(EFABUS),充当航空电子数据总线(AVS)的主总线控制器和攻击数据总线(ATK)的反向总线控制器。
NC中包含两个软件包:供应商提供的软件(SPSW)允许访问NC硬件,买方提供的软件(PPSW)利用SPSW提供LRI功能。PPSW涵盖的主要功能包括:
–主要和次要航位推算
–导航转向
–转向故障计算
–导航固定(OTF)
–最佳导航模式
–LINS速度和位置完整性/姿态监控
–GPS完整性
–生成导航参数
–磁航向计算
–低高度警告
–LINS飞行对准(IFA)
–路线装载(Loading)和操纵
–EFABUS总线控制器
–总线RTs健康状态监控
–世界时坐标(UTC)管理
–输入/输出
–任务数据加载
–非易失性存储器(NVM)检索
–主/从管理
–启动自检测(IBIT)
–通过地面加载单元(GLU)加载软件。
在正常操作模式下,NC执行AVS总线LRIs健康监控,以提供总线LRIs NOGO生成、冗余LRI(CIU、CSG、SCAC、NSPAC)的主/从管理、LRIs IBIT监控以及同步所有系统数据的信息。当NC在反向模式下运行时,它还执行ATK总线LRIs健康和IBIT监控。
如果NC作为航空电子总线的总线控制器失败,总线控制功能将由攻击计算机接管。如果AC作为攻击总线上的总线控制器出现故障,总线控制功能将由导航计算机接管。
在加载多任务数据时,导航计算机还能够将BC功能移交给GLU(通过矢量字协议)。
从硬件角度来看,攻击计算机和导航计算机是相同的,这里称为攻击/导航计算机(AC/NC)。
导航计算机由115V AC XP母线供电。
全球定位系统可升级(Upgradeable)(1B-B-34-51-00-00A-043A-A第005版)
全球定位系统可升级(GPSU)的目的是提供以下导航功能:当前位置、高度、地球参考速度(北、东、垂直)、UTC时间和爬升/俯冲角;输出数据有效性和时间标记。
上述所有导航功能都是通过接收提供全球服务的NAVSTAR发送的信号和代码而产生的。
NAVSTAR星座(Constellation)发送并由天线组接收的射频信号、代码和消息(单座飞机ASS或双座飞机版本AST)通过七根同轴电缆从ASS(或AST)传送至天线电子单元(AEU)。导航系统单元(NSU)/AEU射频接口允许NSU接收L1(1575.42±10.23 MHz)和L2(1227.60±10.23 MHz)频率上的射频信号。C/A代码(非加密代码)可供所有GPS用户使用,且仅在L1频率上传输。P(Y)码(加密码)受欺骗保护,并且在L1和L2频率上传输,并且包括由NAVSTAR星座传输的NAV消息。
来自FCS和LINS中的一个或两个的外部辅助数据提供给NSU,以提高GPS捕获/再捕获性能。
GPSU由以下LRI组成:
–导航系统单元
–天线电子单元
–天线组
–NSU安装架(MR)
–天线组垫片。
NSU包括嵌入在单个模块中的GPS接收器。当提供卫星信号时,NSU GPS模块能够提供精确定位服务(PPS;使用P(Y)-代码)或标准定位服务(SPS;使用C/A-代码)性能。
GPS模块还能够提供以下功能:
–首先使用C/A代码,然后使用P(Y)代码在L1和L2频率上选择和获取GPS导航信号,或直接获取P(Y)代码
–在L1和L2频率上跟踪采集的导航信号
–区分想要的信号和不想要的多径频率效应
–在恶劣干扰和欺骗环境下工作。
–跟踪防欺骗(AS)代码
–使用卫星和飞机数据执行完整性监控功能(RAIM或同等功能),这些数据能够提高GPS模块输出的完整性,并防止欺骗
–输出运行状态并提供导航精度估计
–输出位置和速度的协方差矩阵
–GPS性能不受GPS周数翻转的不利影响
–重新编程模式也允许软件重新加载,而不必从NSU上卸下GPS模块
–提供自检功能,接受并执行外部测试命令
–接受FCS和LINS的辅助数据
–计算位置、速度和时间
–解调并利用导航星星座接收到的50 Hz导航信息。
NSU还向EFABus输出与每个GPS信道已获取/跟踪的卫星相关的信道状态消息,包括L1或L2频率(C/A或P(Y))、硬件信道号、信道故障、卫星号、载波/噪声和干扰机/信号值。NSU还能够输出一个标志,说明何时跟踪4个或少于4个卫星。
首次定位时间(TTFF)定义为从向GPS供电到随后向EFABus输出当前位置、速度和时间的经过时间。当GPS模块中有当前年鉴和加密变量代码时(TTFF搜索天空时除外),确保TTFF性能;适用条件如下:
TTFF1(通过C/A代码采集)
–初始三西格玛位置不确定性不超过100 Km
–三西格玛速度不确定性不超过150 m/s
–一西格玛初始时间不确定性不超过20秒
–最大载具加速度为10 m/s2
–最大载具颠簸(jerk)为100 m/s3
–NSU提供当前年鉴
–C/A代码的J/S为24 dB(干扰是噪声源)。
TTFF1应最小化,且不超过5分钟,在上述条件下,成功概率至少为0.9。
TTFF2(直接P(Y)-代码采集)
–初始三西格玛位置不确定性不超过10 Km
–速度不确定性可忽略不计
–由于“硬件”初始化产生的一西格玛时间不确定性不超过10µs
–载具加速度和冲击可忽略不计
–NSU提供当前年鉴
–P代码的J/S为30 dB。
在上述条件下(当GPS模块已通过PTTI接口加载且UTC时间精度优于10µs时),TTFF2不超过允许的最大4分钟(成功概率至少为0,9)。
当GPS模块不包含当前历书数据或内部时钟不可用时,GPS模块自动进入搜索天空(STS)模式。无论何时GPS模块进入STS模式,NSU都会将上次存储的当前位置输入GPS模块。STS的TTFF最小,且不超过20分钟,在上述条件下,成功概率至少为0.9。
初始卫星捕获通过以下方法之一完成:
–正常启动。当接收器内存中有当前历书数据且PVT估计中的初始不确定性使得卫星捕获过程必须首先进行C/A代码捕获和跟踪,然后移交给P(Y)-代码捕获时,启动该程序。当当前年历可用时,PVT估算中的初始不确定性应为TTFF1的不确定性。
–冷启动。当接收器的非易失性存储器被清除时,应启动它。应通过“搜索天空”技术获取卫星。卫星采集应首先进行C/A代码采集和跟踪,然后移交给P(Y)-代码信号。PVT估算中的初始不确定性应为搜索天空时的不确定性。
–热启动。只要接收器具有当前星历或历书数据,且初始PVT估计值将启用直接P(Y)代码获取,而无需首先获取C/A代码,则应启动该程序。当前星历和历书数据应在非易失性存储器中可用,PVT估计的初始不确定性应为TTFF2的不确定性。
PBIT
设备接通后(即设备的主电源),进入正常运行模式前,NSU应自动执行通电自检测。该BIT应提供与分配给PBIT的时间兼容的设备可用性的最高可能测试。通电位时,设备不产生任何输出,应设置状态字中的忙bit。NSU PBIT应至少包括以下测试:
–CPU检查
–RAM检查(无损),包括闪存检查
–关键内存检查(无损)
–程序存储器检查
–检查外围芯片
–NSU/AEU DL检查
–输入/输出检查,包括STANAG 3910和离散接口
–GPS模块测试
–RF部分检查
–蓄电池电压检查
–PPS-SM和AOC状态检查
–AEU状态。
允许执行PBIT的时间最多为12秒,包括AEU位时间。
雷达高度计(1B-B-34-42-00-00A-043A-A第004版)
概述
集成在导航系统中的雷达高度计可提供当前飞越的任何类型地形的地面高度信息,最高可达5000英尺,测量精度为测量高度的2%或2英尺(以较大者为准)。
它包括:
–发射器/接收器
–发射机天线
–接收器天线

图1.174-雷达高度表控制和显示
通过AVS数据总线发送的高度信息显示在HUD和MHDD/HDHUD格式上(参见图1.174)。
雷达高度表净空高度设置控制和显示分别选择和指示低高度基准。
另外,基于高度信息生成低高度音频/视频警告。
雷达高度表由PP4总线供电。
雷达高度表控制和指示器
雷达高度表净空高度设置控制
可通过位于右防眩光板上的低HT旋转控制装置设置间隙高度。顺时针旋转会增加其值。间隙高度设置控件有两个分辨率级别,如下所示:
–从0到300英尺:10英尺增量
–从300英尺到5000英尺:增量为50英尺
同样,逆时针旋转将减小相应台阶的间隙高度设置值。在NAV和A/A(A/A和A/S)POF期间,当飞机低于选定的净空高度设置时,警告设施激活CAT 1音频/视频警告,包括闪烁的注意力吸引器和低空音频语音消息。
此外,HUD和MHDD/HDHUD格式上通过围绕其中心点旋转的闪烁箭头显示上拉指示,以使其始终指向远离地面及其下方的低高度标题。
一旦最佳高度大于净空高度基准的3%,低高度警告将重置。低高度警告由NC处理。
注意
事项
当WOW在ON(接通)到OFF(断开)之间切换且NAV(导航)或A/A POF(自动进近)接通时,低高度警告产生延迟15秒。
雷达高度表净空高度设置显示
与净空高度设置控件相邻的四位显示器指示选定的净空高度值。
雷达高度表传输控制开关
位于右控制台系统连接杆上的两位“RAD ALT/OFF”拨动开关控制雷达高度计传输。开关受到物理保护,以防止意外选择断开位置(飞行中缺少低空警告生成)。必须向上拉动开关轴才能选择断开。开关功能如下所示:
–RAD ALT(前进)。选择后,雷达高度计发送
–关(后)。选择后,雷达高度计不发射

有关更多详细信息,请参阅第1-369页的表“RADALT操作模式”
注意
事项
●(*)在接地POF期间,雷达高度计发射,但不提供指示
●(**)倾斜/倾斜时通过数据总线>60°和/或空调姿态率超过±60°/秒超过2秒。
●(***)通过离散链路(discrete link)进行隐身。
●(****)通过MDEF,随时抑制飞机的所有排放。
雷达高度计故障告警
注意
事项
低空视听警告和起落架音频警告丢失
在所有POF中,雷达高度计故障由闪烁的告警器、注意力、RAD ALT语音消息和RAD ALT DWP标题提供。
HUD导航格式
雷达高度表高度基准以HUD导航格式显示(以10英尺为增量)。如果雷达高度计解锁或在5000英尺以上飞行时,如果选择了仅雷达高度计,则指示将被闪烁的气压数字替代。
MHDD/HDHUD格式
雷达高度表高度基准以MHDD/HDHUD格式显示(以10英尺为增量)。如果雷达高度计解锁或在5000英尺以上飞行时,如果选择了仅雷达高度计,则指示将被闪烁的气压数字替代。
雷达高度计工作模式
雷达高度表有两种主要工作模式:待机和发射。
待机模式
在地面,通电时,雷达高度表执行启动自检测(SBIT),如果成功,则进入待机模式。
在待机模式下,雷达高度计发射被抑制:根据第1-369页的表“雷达工作模式”,可自动或手动满足此条件。
只要通电,SBIT就会执行。此外,只要接收到传输命令(2秒),SBIT的子集就会自动执行。如果SBIT不成功,则无法执行从待机模式到传输模式的转换。
传输模式
发射模式为雷达高度计正常工作模式;RAD ALT变速器控制开关必须设置为RAD ALT(RAD ALT变速器)位置。
传输模式由以下子模式组成:
–搜索
–轨道
–内存
在搜索模式下,系统获取初始锁定,然后自动切换到跟踪模式,从而提供高度基准。
在暂时失去锁定的情况下,雷达高度表进入记忆模式,提供最长1秒的最后一次高度存储值。如果锁仍然丢失,系统将切换到搜索模式以重新获取锁。
为确保在所有飞行条件下正确运行,发射机功率随感知高度变化(也用于隐身目的)。
CBIT/IBIT设施
该系统包括CBIT和IBIT设施。一旦SBIT成功完成,CBIT将自动启动,并且不阻止雷达高度计的正常运行(前提是未检测到故障)。
CBIT以固定速率执行。
IBIT可由地勤人员通过MDP进行,最长持续10秒。
塔康(1B-B-34-52-00-00A-043A-A 002版)
简介
战术空中导航(TACAN)系统是一种无线电导航辅助设备。该设备由两个天线、一个发射机/接收机单元和一个天线切换单元组成。通过手动数据输入设备(MDEF)进行控制。
塔康设备提供传统的空对地(AS)和空对空(AA)模式。使用AS接收模式,系统提供磁轴承;在AS或AA发送/接收模式,系统还提供以海里为单位的倾斜(slant)范围。
天线切换单元自动选择接收最强信号的天线。
功能
通电后,塔康系统默认为“开”。位于蓄电池横杆(gangbar)内的右侧控制台上的MIDS拨动开关有两个位置。当选择MIDS时,塔康在发送/接收模式下工作。选择关闭时,塔康仅在接收模式下工作。
当选择AS接收模式时,或通过MDE(XMIT子系统键)选择TACAN静默模式时,车载TACAN发射机被抑制。在这种情况下,塔康将只提供对地面信标的磁轴承,没有倾斜范围。
信标通过通信和音频管理单元(CAMU)以莫尔斯电码的音频音调向机组的耳机确认其身份。使用位于左后控制台上的旋转控制装置调整音频音调的音量。

图1.175-塔康显示器(MHDD/PA格式)
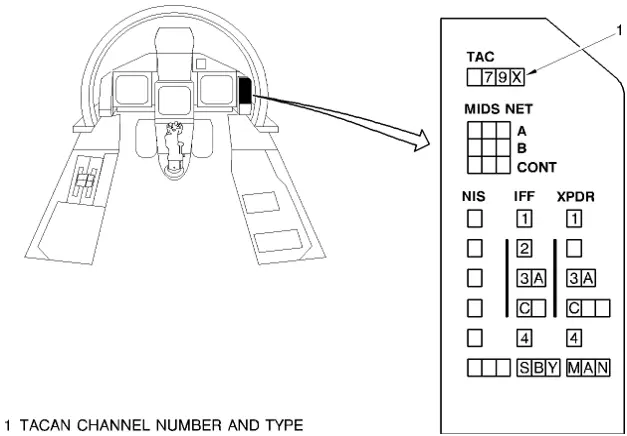
图1.176-右防眩光面板-专用读出面板-塔康通道编号和类型
范围(RNG)和方位(BRG)信息以数字方式显示在MHDD/PA格式的方框中。选择MHDD/HSI格式的NAV/TAC软键至TAC,仍将显示范围和方位信息,以及TACAN通道号、类型和模式,以替代导航航路点数据,参见图1.175。塔康通道、方位和范围数据的读数也可显示在抬头显示器(HUD)上。塔康通道编号和类型也显示在位于右侧遮光板上的专用读取面板(DRP)上,参见图1.176。
塔康系统通过PBIT进行测试,经过3分钟的预热后即可完全运行。CBIT正是在这个阶段启动的。CBIT检测到的系统故障由专用警告面板(DWP)上的“TACAN”指示和语音消息“TACAN”显示。如果TACAN功能失败(或不存在),则TACAN的修改键不亮。
塔康有以下三种操作模式:
空对地接收模式
在此模式下,系统仅使用所选塔康地面信标发送的信号计算该信标的磁轴承。
空对地发射/接收模式
在此模式下,系统将询问脉冲对发送到选定的塔康地面信标,以确定以海里为单位的倾斜范围。
空对空发射/接收模式
在此模式下,系统将询问脉冲对传输至选定的AA塔康飞机,如油轮和合作战斗机,以确定以海里为单位的倾斜范围。
操作

图1.177-塔康显示器-左防眩光板(WOW)
此操作模式和通道选择通过导航辅助系统软键、修改键和左侧眩光屏上的MDEF进行。按TAC ON moding键将系统设置为TAC SBY,再次按moding键将系统返回TAC ON。选择TAC AA将导致取消选择TAC AS,反之亦然。意外选择任何盒装的修改键都不会对系统产生影响。选择TAC AA和TAC作为修改键不会影响TXRX修改键,参见图1.177。按下TXRX moding(TXRX修改)键可在接收模式和发送模式之间切换。默认选择如图1.177所示。
注意
事项
如果塔康处于隐形控制下,则moding键的上部TXRX图例不亮,因为此选项不可用。
编辑塔康频道-输入新频道

图1.178-编辑塔康频道-输入新频道
要更新当前(CRNT)TACAN信道号,飞行员可以在ROL 3中重新输入上一个(上一个)TACAN信道号。飞行员还可以通过选择数据输入键盘(DEK)上的Y键将ROL 3中的塔康类型从X更改为Y,该操作将使DEK显示X,参见图1.178。
定义第一个字符时,上一个图例将变为新字符,第二个和第三个字符将自动恢复为短划线,以便接收剩余塔康数据。在DEK上选择ENT键时,ROL将立即变为空白,然后将新通道号显示为CRNT,将以前的CRNT通道号显示为PREV。
要编辑TACAN通道-选择/清除上一个

图1.179-编辑塔康通道-选择/清除上一个
导航POF默认选择TAC数据修改键;可以在任何其他POF中手动选择TAC数据。ROL将重新配置以显示当前(CRNT)和上一个(PREV)TACAN通道号。如果没有上一个通道号,ROL 3将显示NEW---X,参见图1.179。
要选择上一个通道号,请选择DEK上的ENT键。上一个信道号发送到系统,用作CRNT信道号,并切换ROL 2和ROL 3中的信息。
要清除上一通道号,请选择DEK上的CLR键;在ROL 3中,通道编号将设置为破折号,且上一个图例将更改为新图例;通道类型默认为X。CRNT通道号不会更改。
导航系统(1B-B-34-10-00-00A-111B-A第003版)
简介
















图1.180至图1.195中显示了与导航系统相关的典型多功能低头显示器(MHDD)。
通信系统
通讯器材(1B-B-23-00-00-00A-043A-A第003版)
该通信系统提供清晰、安全的空对空和空对地通信以及音频管理。该系统由两个相同且独立的V/UHF收发器、一个较低的V/UHF天线、一个翼梢组合天线、通信和音频管理单元(CAMU)、多功能信息分发系统(MIDS)及其相关控制和指示灯组成。
V/UHF收发器以清晰/安全和固定频率/ECCM模式的所有不同组合提供无线信号的传输和接收。支持的模式有HaveQuick I/II和SATURN。
通信和音频管理单元控制和管理飞机通信和音频警报生成。
鳍(ps:指垂直尾翼)尖组合天线安装在鳍的顶部,并连接到收发器1。该天线发射/接收UHF或VHF频率和D波段频率。
下部V/UHF天线安装在机身中部下部,就在左侧进气口下方,并连接到收发器2。该天线仅发射/接收VHF或UHF频率。
V/UHF无线电(1B-B-23-21-00-00A-043A-A第003版)
两个相同且独立的V/UHF收发器以清晰/安全和固定频率/ECCM模式的所有不同组合提供无线电信号的传输和接收,在以下频段和调制下运行:
在无ECCM模式下:

在ECCM模式下:

每个收发器有24个预设通道和1个手动通道,并包含一个独立的防护接收器。根据导频选择,将保护接收机调谐到121.5 MHz或243.0 MHz的频率,并且与收发器工作的频带无关。
每个收发器连接到不同的天线,收发器1连接到鳍尖组合天线,收发器2连接到低V/UHF天线。
两个收发器都作为远程终端连接到航空电子数据总线。操作座椅弹射器控制装置时,“crypto erase”信号连接到每个收发器。
从基本直流母线PP7向收发器1供电,从非基本直流母线PP2向收发器2供电。对于固定频率和HQ模式,发射机功率输出水平为20 W(正常功率),对于土星(SATURN)模式为30 W。收发器具有用于设备监控的BIT程序。
通信和音频管理单元(1B-B-23-51-00-00A-043A-A第004版)
通信和音频管理单元(CAMU)控制和管理飞机通信系统。CAMU具有以下功能:
–音频路线、混音、匹配、放大和调节
–两个V/UHF收发器、分配单元(DU)和塔康/MIDS(以安装的为准)的音频接口
–与两个V/UHF收发器、视频语音记录器(VVR)和接口处理器单元(IPU)的音频接口
–与Telebrief接地链路之间的音频接口
–两名飞行员以及飞行员和地勤人员之间的通信
–生成和控制语音信息警告、注意事项和音调
–通信系统管理和远程处理
CAMU由相互连接的功能模块组成。功能模块包括:一个可编程处理器模块、两个音频通信模块、两个警告生成器模块、一个音频滤波和切换模块以及一个外部数据总线终端模块。
可编程处理器模块启用其余功能模块。
音频通信模块与音频过滤和切换模块一起对通信进行路线、混音、匹配、放大和调节。每个音频通信模块包括:
–两个冗余和可选的扬声器板,每个板都有一个普通扬声器和一个备用扬声器
–每个音频信号的预设默认音量
–默认PTT(仅无线电1)。
警告生成器模块生成警报、语音警告消息和铃声。Get-U-Home(GUH)离散警告的生成在两个警告生成器模块上重复。
飞行员的CAMU音频输出通过机组服务包LRIs传输至耳机。
CAMU功能的先导动作包括:
–PTT操作
–语音警告信息暂停(语音关闭)
–音频放大器选择
–无线电1、2、塔康、MLS、MIDS语音频道A/B、导弹音调、Telebrief和对讲机的音频音量选择。
–默认音量选择。
通信(1B-B-23-00-00-00A-111B-A第002版)
介绍

通信设备(RAD1和RAD2)数据可显示在多功能抬头显示器(MHDD)无线电格式页上,参见图1.196。
MHDD可以显示RAD1或RAD2的状态,但在任何时候都只能显示通道列表的一半,要求飞行员使用page UP(向上翻页)或page DOWN(向下翻页)软键或通过在page UP(向上翻页)/page DOWN(向下翻页)符号上放置X-Y插入来选择所需的页面。
RAD1和RAD2可通过使用MHDD上的相应软键或通过将X-Y插件定位在RAD选择图标上来选择。有关更多信息,请参阅:
–通信设备第1-396页。
–通信设备第1-399页。
通讯器材(1B-B-23-00-00-00A-111A-A第004版)
概述

A 工作模式
B 启用保护模式和发送/接收
C 所选频道显示
D 与所选通道相关的频率
、7 类似于无线电2的ITEM4至6、8 数据输入键盘、9 显示栏
图1.197-通信设备-控制和指示(第1页,共2页)

图1.197-通信设备-控制和指示(第2页,共2页)
通信设备由抬头面板(HUP)、左防眩光面板、左后控制台、右后控制台(蓄电池连接杆)和油门上的控制装置操作(见图1.197)。

A 工作模式
B 启用保护模式发送/接收
C 所选频道显示
D 与所选通道相关的频率
、7 类似于无线电2的ITEM4至6、8 数据输入键盘、9 显示栏
图1.198-通信设备-后驾驶舱-控制和指示(第1页,共2页)

图1.198-通信设备-后驾驶舱-控制和指示(第2页,共2页)
后驾驶舱复制通信控制和指示(见图1.198),但默认音量选择器开关、无线电1和无线电2发射开关、语音警告控制开关和MIDS控制开关除外。
抬头面板控件
HUP包含无线电1和无线电2音量控制、无线电1和无线电2频道选择器旋钮以及无线电1和无线电2读数显示。
无线电1和无线电2音量控制
无线电1和无线电2音量控制为圆形旋转控制。顺时针旋转可增加飞行员耳机中相应收音机的音量。逆时针旋转可降低音频音量。
无线电1和无线电2频道选择器旋钮
每个无线电频道选择器旋钮都是同心安装的,其各自的无线电音量控制装置位于一个单独的控制装置中,但独立运行。无线电频道选择器旋钮直径较小,伸出无线电音量控制。无线电频道选择器旋钮有两个位置:输入和输出。
在“In”位置,旋转旋钮可选择多个离散位置。顺时针旋转旋钮,以1为单位将选定的无线电频道数从1增加到25(1到24为预设频道,25为手动频道)。如果设置了通道25,则进一步顺时针旋转将选择1、2、3等。逆时针旋转旋钮,以1的步数减少所选通道。
当拉到“out”(退出)位置时,旋钮选择243.0 MHz的紧急频率进行传输和接收。
无线电1和无线电2读数显示
在其相应的收音机音量控制和频道选择器旋钮附近,收音机读出显示屏显示以下参数:
A、 操作模式:
“CLR”表示清除模式,“SECR”表示安全模式。
B、 读数显示:
“GU”表示UHF防护接收器选择
“GV”表示VHF防护接收器选择
“U”表示通过收发器接收或传输,选择“UHF防护接收器”选择
“V”表示通过收发器接收或传输选择
“VHF防护接收器”选择
“ ”为无防护接收器,或选择紧急通道,并且没有接收或传输
“-”,以便通过收发器接收,而没有选择任何防护接收器。
在接收或传输信号结束后,符号“-”、“U”和“-V”保持显示3秒钟。
C、 所选频道编号:
“1至24”为预设频道
“M”为手动频道
“G”为防护紧急选择
D、 与所选当前频道相关的频率或ECCM网络(预设、手动或紧急):
###.### 对于固定频率
HQ1####对于HaveQuick I网络
HQ2####对于HaveQuick II网络
SAT####A代表土星A网
SAT####B代表土星B网
注意
事项
#数字表示频率或网络。
左防眩光面板控制
手动数据输入设备(MDEF)位于左防眩光面板上,包含无线电1和无线电2子系统键以及相关的修改键。与收音机1和收音机2子系统相关的数据能够显示在显示器上,并通过数据输入键盘输入/编辑。
无线电1和无线电2子系统键
无线电1和无线电2子系统的操作相同,可使用RAD1或RAD2子系统键(SSK)选择/取消选择。
关联的修改键
选择适用的SSK(RAD 1或RAD 2显示为方框)后,以下模式/数据输入选项可在修改键(MK)上使用:
NRW/BRD 控制选定频率周围宽频带或窄频带的接收(仅在清除模式下)。
MAN/PSET 允许飞行员为手动和预设频道定义工作频率。此外,可以通过数据输入键盘操作选择Havequick和Saturn模式及其相关的网络标识符来代替标准频率。它还允许在清除和安全之间预选无线电传输。
SQ ON/OFF 取消选择自动静噪功能,以帮助在增加背景噪音的情况下听到微弱信号(仅在清除模式下)。
GRDU/GRDV 选择UHF或VHF保护频率的保护接收机,或选择关闭接收机。
NORM/LOW 在正常和低发射机功率输出之间进行选择,以降低发射功率并增强隐身特性。
HAIL ON/OFF 允许飞行员选择土星冰雹(Hail)设施,通过该设施,呼叫者可以吸引飞行员注意,需要以预定义的频率进行通信。
TX TIME 允许飞行员将其时间(一天中的时间,TOD)传输到接收平台。收音机1和收音机2可能使用不同的时间。选择此功能时,RX TIME(接收时间)功能将被占用,并且在5秒钟内不可用。
RX TIME 允许飞行员从另一个平台接收操作时间。选择此功能后,TX TIME(发送时间)功能将被占用,并且在5秒钟内不可用。
被框住的修改键对应于在无线频道选择器上选择的当前频道。要更改此设置,请按相应的修改键(适用的标题将显示为方框)。
左后控制台控制
左后控制台包含复制PTT开关、塔康/MLS音量控制、对讲机音量控制、放大器选择开关、默认音量选择开关、导弹音频/Telebrief音量控制和MIDS A/B音量控制。
重复PTT开关
重复PTT开关有3个位置、2个瞬时位置和一个中心偏压位置。开关标记为RAD 1-BOTH-RAD 2。这3个位置是:
BOTH 无线电1或无线电2上无传输器。按下后,只要开关保持在此位置,通过无线电1和无线电2的传输器将同时启用。
RAD1 保持时,通过无线电1进行传输。
RAD2 保持时,通过无线电2进行传输。
注意
事项
当默认音量选择器开关处于DFLT VOL(DFLT音量)位置时,传输仅限于无线电1。
塔康/MLS音量控制
这些控件是同轴的,中央(顶部)控件用于塔康,外部(底部)控件用于MLS。顺时针旋转会增加音频音量,逆时针旋转会降低音频音量。
对讲机音量控制
对讲机音量控制是一个标有I/C的旋转控制。顺时针旋转此控制可增加对讲机音量,逆时针旋转可降低此音量。
放大器选择器开关
放大器选择器开关是一个两位拨动开关,在前后驾驶舱中标记为NORM和REV。
前驾驶舱放大器选择开关
NORM音频放大器的选择由CAMU自动进行,具体取决于音频放大器的状态:
–为了获得良好的状态,CAMU会自动选择音频模块1的正常放大器。前驾驶舱选定的音频信号连接到前驾驶舱耳机。音频信号级别由前驾驶舱音频控制装置控制。
–对于故障状态,CAMU会自动选择音频模块2的备用放大器。前驾驶舱音频信号的级别由后驾驶舱音频控制装置控制。
REV 此位置覆盖CAMU的自动放大器选择。
后驾驶舱放大器选择开关
NORM音频放大器的选择由CAMU自动进行,具体取决于音频放大器的状态:
–为了获得良好的状态,CAMU会自动选择音频模块2的普通放大器。后驾驶舱选择的音频信号连接到后驾驶舱耳机。音频信号级别由后驾驶舱音频控制装置控制。
–对于故障状态,CAMU自动选择音频模块1的修正放大器。后驾驶舱音频信号的电平由前驾驶舱音频控制装置控制。
REV 此位置覆盖CAMU的自动放大器选择。
默认音量选择器开关
默认音量选择器开关(仅位于前驾驶舱)是一个两位开关,标记为NORM VOL和DFLT VOL。
正常电压每个音频信号的音量,前座舱和后座舱,由CAMU的输入控制。
DFLT Volt前后驾驶舱的每个音频信号的音量是CAMU中预设的默认音量。此外,选择默认的PTT可将传输限制为仅在前驾驶舱中传输至无线电1,仅在后驾驶舱中传输至无线电2。至CAMU的各个音量控制输入无效。
为防止意外选择,在将开关置于DFLT VOL位置之前,必须拉动开关。
导弹音频/电传音量控制
导弹音频/电传音量控制是一种旋转控制,标记为MSSL和TB。
在地面上,顺时针旋转会增加Telebrief音量,逆时针旋转会降低音量。按下控制按钮,只要控制按钮保持在此位置,就可以通过Telebrief链接进行传输。控件偏向上部位置。
在飞行中,顺时针旋转会增加导弹音频音量,逆时针旋转会降低该音量。
右后控制台控制
无线电1和无线电2发送开关以及语音警告控制开关包含在右后控制台上,蓄电池连接杆内。
无线电1和无线电2传输开关
无线电1和无线电2传输开关为两个位置,切换开关,标记为RAD1(或RAD2)和OFF。当置于RAD1(或RAD2)位置时,可通过相应的收发器进行传输。当置于OFF时,通过其相应收发器的传输被禁用,接收工作。
语音报警控制开关
语音警告控制开关是一个两位拨动开关,标记为voice(语音)和OFF(关闭)。当设置为语音时,可从CAMU听到语音警告信息。当置于OFF位置时,飞行员听不到警告信息(灾难性警告除外)。为防止开关意外操作,飞行员必须在将开关置于断开位置之前拉动开关。
到此为止为401页

欢迎各位莅临本群讨论!

