
DT600_DT200 组合导航系统快速指南
1. 简介
该指南用于快速配置 DT 系列 GNSS/INS 组合导航系统和 RT-Strut 安装支架。文档中的说明基于 DT600 产品,但是也适用于其他 DT 系列产品,如 DT200。更多信息,请参考每个产品的详细说明书。
2. 安装软件插件
为了实时观察和配置 DT 产品,需要先安装 Dewesoft 数据采集系统软件和 DEWESOFTPLUGIN-DT600 软件插件,下面介绍如何安装软件插件:
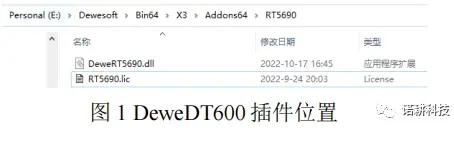
1:拷贝 DT600.dll 和 DT600.lic(授权文件,如果没有则提示插件为评估版本)至Dewesoft 安装目录,如 E:\Dewesoft\Bin64\X3\Addons64\DT600
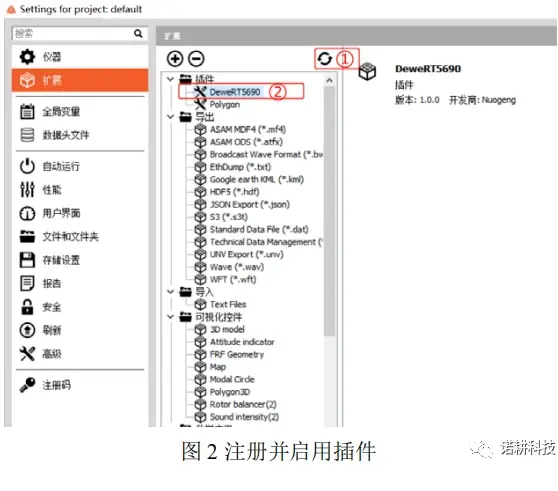
2:注册插件。依次打开 Dewesoft 软件->右上角 Options(选项)->Settings(设置)->Extensions(扩展)-> (刷新)->使能 DeweDT600 插件->保存并重启软件。
3. 安装 RT-Strut 支架
RT-Strut 用于在车内快速固定 DT 产品,使用 RT-Strut 可以更好的精确测量车辆的运动。按照下列步骤在车内安装 RT-Strut 支架:
-在车内找到合适的位置固定 RT-Strut
-松开中间管箍的手柄
-拉伸/缩短 RT-Strut 伸缩杆,使顶盘顶到车顶
-缩紧中间管箍的手柄,锁定伸缩杆
-转动弹簧手柄,使支架完全顶住车顶
-检查 RT-Strut 是否已经固定好,在各个方向有无移动
-如果长度不够,可以安装扩展支腿至 RT-Strut 底部固定块

4. 安装 DU100 直流不间断电源
DT 产品属于精密仪器,内置高精度加速度和角速度传感器,在工作的时候需要实时跟踪卫星和记录数据,对电源的稳定性和持续性有一定的要求,因此不能断电。并且每次重启后,都需要执行初始化和热启动动作。
DU100 是一款高效率的直流 UPS 电源模块,专为需要直流后备电源的应用场合所设计。模块输入电压范围宽 9-28VDC,内置锂电池作为后备电池,输出接口提供 6 路 4mm 香蕉插座,1 路车载点烟器插座。输入电源有电时,模块给电池充电,同时输出稳压后的电源给设备。当输入电源断电时,模块自动切换为内部电池供电,并提供稳压后的电源给设备,切换时间几乎为零,不影响负载工作。

5. 安装 DT 主机
见下图,先安装夹具到主机上,再把夹具夹到 RT-Strut 伸缩杆上。尽量使主机的安装位置低些,因为车辆运动时,车顶方向的移动幅度往往比车底更大些。夹具安装孔未对齐时,请勿强行拧螺丝,否则容易发生卡死,滑丝等故障。
注意:内部包含易碎部件,跌落到地面有可能会损坏产品。
注:在测试的时候,需要保证主机或者天线之间不会移位,二者必须通过刚性连接。

6.安装 GNSS 天线
单天线模式:
-安装 GNSS 天线到车顶上,天线最好在主机的正上方(方便测量 GNSS 天线和主机之间的杆臂值)。
-连接 GNSS 天线到主机的 BACK 天线接口上。

双天线模式:
-尽量布置 FRONT 从天线(负责双天线航向)在车顶的前部,BACK 主天线(负责位置和速度)在后部,天线基线方向沿着车辆 x-轴或者 y-轴指向,默认一前一后安装。
- GNSS 天线尾部的馈线尽量朝着同一个方向。
-如果是航空天线,天线底部需要额外的屏蔽地,务必放在金属车顶上,离车顶边缘 20cm以外的位置,不要放在最边沿处。
-如果是测量天线(蘑菇头天线),内部已经自带了屏蔽地,可以放在边缘位置。
-连接主天线到 BACK 天线接口,从天线到 FRONT 天线接口。
备注:需要精确测量 GNSS 天线的位置,否则会影响系统的精度。
金属车顶,航空天线或者蘑菇头天线,默认均使用磁吸座,方便安装;玻璃钢材质的非金属车顶,不能使用航空天线(需要额外的屏蔽地),需要选用蘑菇头天线+真空吸盘底座。

7.硬件连接示意图
按照图 10 的方式连接产品,需要记住:请勿带电拔插通讯接口连接器,否则接口有烧坏的可能性。

8.配置系统
8.1 设置电脑本地 IP 地址在配置 DT 之前,需要先配置电脑的 IP 地址为静态 IP,且电脑 IP 地址需要与 DT 的 IP地址不同,详细如下:
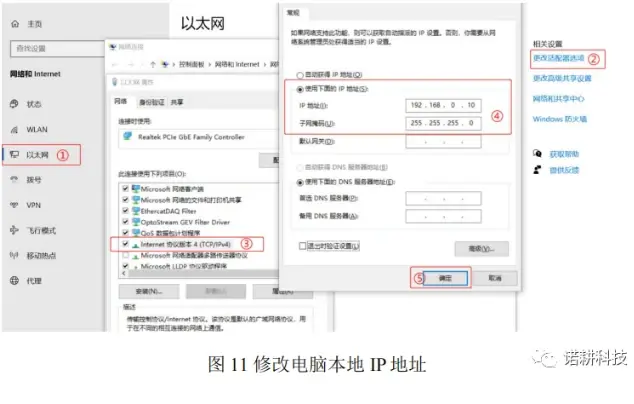
配置完 PC 静态 IP 地址后,两个系统就才会互相通讯,接下来就可以对 DT 进行配置。
注:如果收不到数据,尝试禁用网络防火墙,以减小系统阻止 DT 和电脑通讯的几率。
8.2 设置通讯连接参数
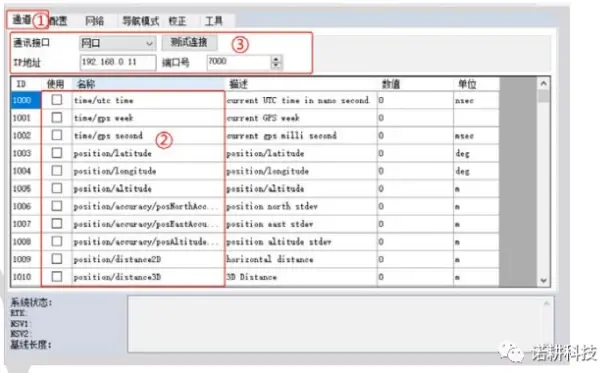
1 Dewesoft 软件->通道设置菜单->选择 DeweDT600->选择通道页面。
2 根据实际测试需求来勾选所需要的通道数据。
3 修改参数设置,传感器 IP 地址为 192.168.0.11,PC 电脑接收数据端口号为 7000。
4 点击测试连接,正常收发数据,右侧窗口显示收到数据包,底部窗口显示交互指令
5 NSV1 表示主天线卫星数,NSV2 表示从天线卫星数。
8.3 设置坐标轴和杆臂值参数
需要精确测量 DT 安装方向和车辆的轴向之间的关系,以及 BACK 主天线和主机 IMU原点的杆臂值。对于双天线系统,两个天线的基线长度建议在 1m 以上。
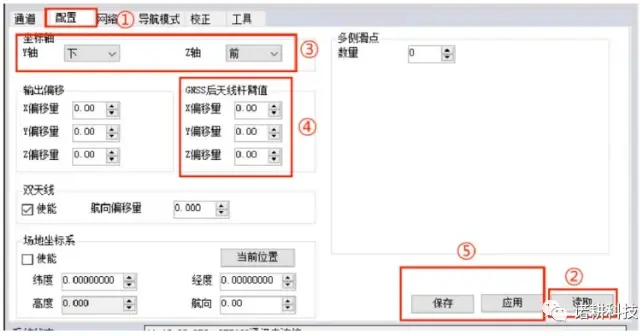
6 DeweDT600 插件->选择配置页面
7 点击读取,可以读取当前的配置参数
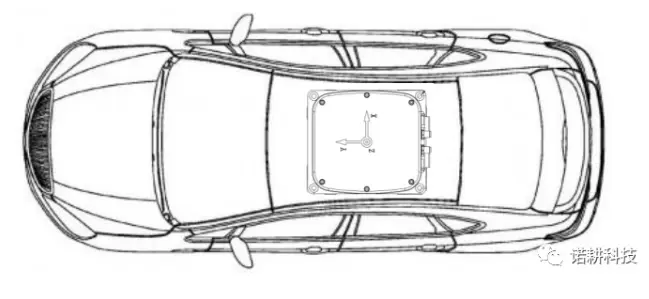
8 设置 IMU 坐标轴方向,方法为人从车后往车前看,记住主机标签上面的 Y 轴和 Z 轴的指向。图示为 Y 轴朝前,Z 轴朝上。
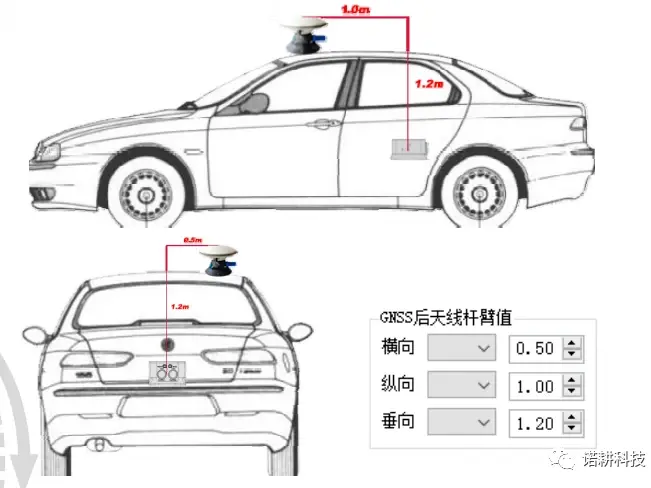
9 设置 GNSS 后天线杆臂值,方法为人站在主机 IMU 的原点上,面朝车头行驶的方向,记录 BACK 主天线相对于观察者的方向和位置关系。用尺子测量主机 IMU 原点到 BACK主天线的杆臂值。
10 输入横向(右左),纵向(前后),垂向(上下)的偏移量,测量误差 10cm 以内,否则会影响算法的收敛精度。例:人站在 IMU 原点上观察 Back 主天线
主天线在右侧 0.5,横向偏移量为右 0.5m。
主天线在前方 1.0m,纵向偏移量为前 1.0m。
主天线在上方 1.2m,垂向偏移量为上 1.2m。
点击应用,临时写入参数,断电后参数不会保存。点击保存才会永久保存参数。
9.初始化、热启动和在线校正
9.1 初始化:指系统进入组合导航状态(GNSS 卫星导航和 INS 惯性导航融合状态),需要满足收到 GNSS 卫星信号和获取初始航向。未初始化前,系统不会输出精确的测量值。
-打开通道页面,如果之前没有点击测试连接,这里需要先点击测试连接
-观察右上角的数据包接收是否正常;左下角的收星情况是否正常(至少大于 6 颗卫星)动态初始化:加速朝前沿直线行驶,速度要大于 20km/h,此时算法根据速度航向来作为初始航向,此时不可倒车。静态初始化:仅双天线支持静态初始化,单天线只能动态初始化。车辆停在空阔无遮挡的地面,等待双天线锁定航向即可。
9.2 热启动:初始化成功后,需要执行热启动,热启动时卡尔曼滤波算法会跟踪卫星导航和惯性导航。此时可以激活双天线航向校正,这样热启动时就能同时评估双天线航向和 Y 轴之间的偏移量。
-热启动需要在初始化完成之后,紧接着执行。
-热启动过程需要 15 分钟左右,在该时间内,请做多个跑“8”字或者“日”字的动作,期间要有加速、减速、转弯、停车等动作
-注意读取速度/航向/姿态等值,肉眼观察是否符合预期
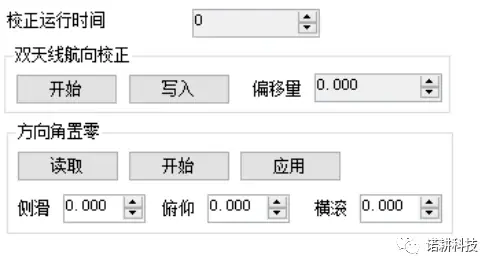
9.3 在线校正:初始化之后,需要执行在线校正,校正后会自动减掉三轴方向角度偏差。
-双天线航向校正:目的是校正双天线航向到 IMU 的 Y 轴方向。如果是单天线模式,不需要校正这里。可以在初始化完成之后,热启动时激活双天线航向校正,这样热启动时就能同时评估双天线航向偏差。
-方向角置零:需要先找到一条直道,点击开始之后,期间不可拐弯,沿着直线行驶 100米以上,速度大于 20km/h,然后停在水平的地方。
-观察系统计算的侧滑/俯仰/横滚角度偏差是否符合预期。点击应用,临时存储校正参数,断电后需要重新校正。
10.数据记录及分析
10.1 通道设置,之前的步骤已经完成。
10.2 数据显示
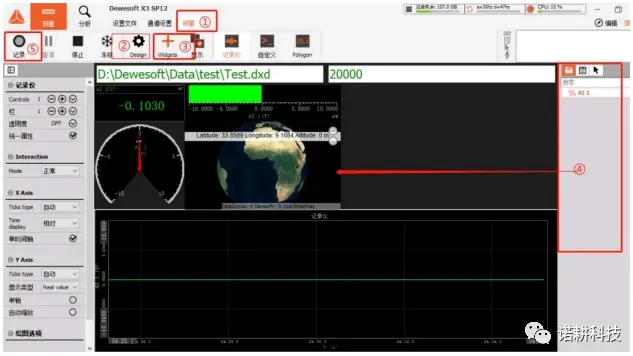
①单击进入 Dewesoft 测量界面。
②选中 Design 才能对显示控件进行编辑。
③增加需要的显示控件,如数字表,转速表,曲线图,地图等。
④先选中显示控件,再在右侧通道列表中单击选择想要查看的数据通道,即可关联二者。
⑤点击记录,数据开始存储,存储路径如下图显示在 D:/Dewesoft/Date/test,点击停止,数据保存完成。
10.3 数据回放
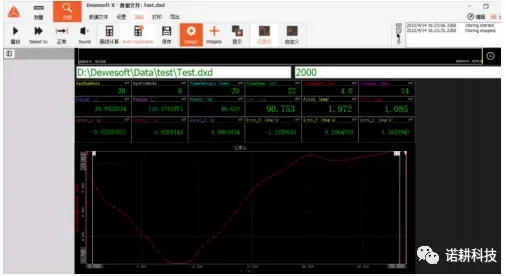
①在 Dewesoft 的软件界面,点分析功能,双击打开要查看的数据。
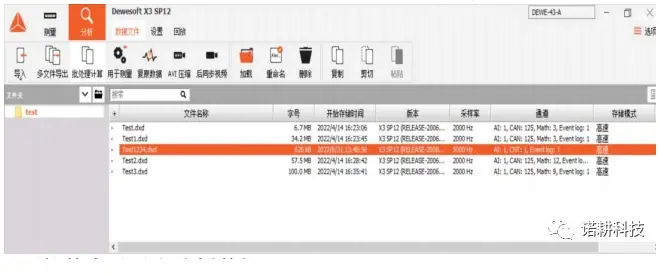
②可以编辑显示控件来显示和分析数据。
10.4 数据导出
①选择 Dewesoft 导出功能。
②选择数据通道,导出列单击来切换选择是否导出。
③对导出的数据进行类型选择,文件格式的选择。
④可对即将导出的数据文件重命名。
⑤单击导出,等待导出进度条结束,导出数据。

11. 更多说明
为了更好的使用 DT,请仔细阅读产品说明书。
12. 通道数据说明
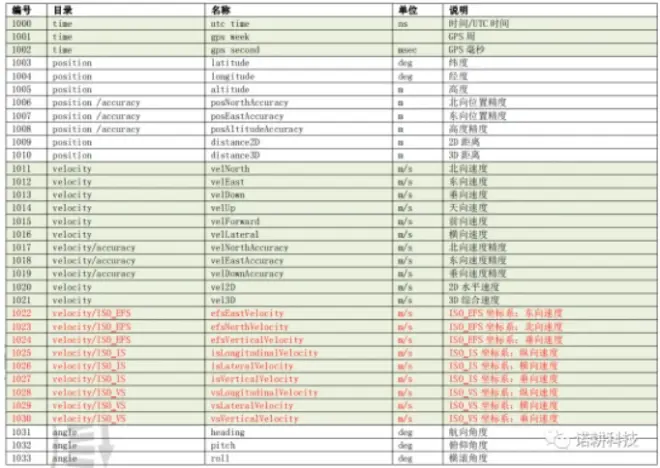
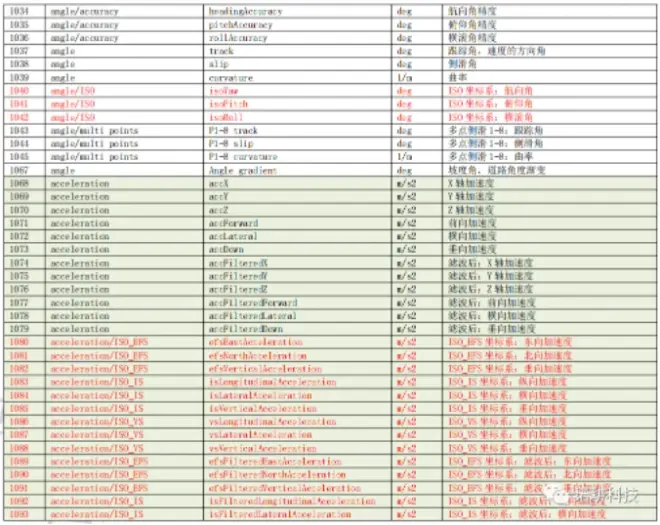
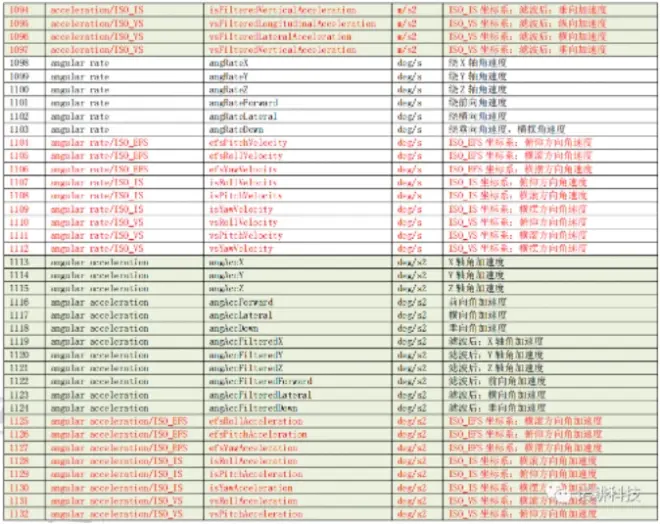

如有疑问可以联系我们。
