
机械臂关节:电机驱动与FOC控制
在我上一期的文章(空中作业:能控制力的机械臂关节!)中,我介绍了能用力控制的机械臂关节,这期我将对这类驱动板和FOC的控制方式做一个具体的介绍。
▌什么是FOC控制?
FOC(Field-Oriented Control),即磁场定向控制,也称矢量变频,是目前高效控制无刷直流电机(BLDC)和永磁同步电机(PMSM)的最佳选择。FOC 能精确地控制磁场大小与方向,使得电机转矩平稳、噪声小、效率高,并且具有高速的动态响应,优越的高低速控制性能。目前已在很多应用上逐步替代传统的控制方式,在运动控制行业中备受瞩目。利用FOC控制的产品在我们生活中处处可见,家电消费的变频空调、高性能吹风机、洗地机,工业领域的新能源汽车电机、生产线上的伺服电机[1],又或是热门的机器人行业[2],都离不开FOC的身影。

▌FOC控制的核心思想
笔者认为,想要通俗地理解FOC(磁场定向控制),需要先从名称入手,即磁场、定向、控制这三部分。
磁场:通过SVPWM等手段合成矢量磁场。
定向:通过一定手段准确测量到转子的位置。
控制:根据期望的定子磁场矢量,对磁场的大小与方向进行准确控制。
接下来,我将通过坐标变换和运动方程,解释以上三部分在FOC控制上的体现。
▌坐标变换
通过逆变电路,我们可以输出调制三相电压,对电机进行控制。然而对于非线性信号进行准确控制,需要非常复杂的高阶控制器,驱动动辄上万转速的电机,控制的实时性无法达到。所以,为简化自然坐标系下的三相PMSM的数学模型,实现控制上的解耦,需建立相应的坐标变换包括静止坐标α-β 变换和同步旋转坐标d-q变换,即Clark变换与Park变换。其具体过程就是将三相坐标系交流转为两相坐标系交流,然后将两相坐标系交流转为电机自身旋转坐标系下的直流量。从而简化控制过程。
▌自然坐标系
如下图所示,将一个旋转的向量映射到三相自然坐标系[3]上,波形如右图所示。

▌αβ 坐标系
我们可以用两相正交坐标系[4]下的交流量来表示三相坐标系下的交流量,保证幅值不变。这种由三相自然坐标系到两相静止坐标系的变换为Clark变换。

▌dq 坐标系
我们将两相静止坐标系下的电流转化到两相旋转坐标系上[5],以直流量的方式进行PI运算。这种由两相静止坐标系到同步旋转坐标系下的变化为Park变换。根据物理结构,d轴与转子磁链方向重合,q轴与转子磁链方向垂直。id(direct)为励磁电流也称为直轴电流,iq(quadrature)为转矩电流也称为交轴电流。

▌力的控制
通过以上的坐标转换推导,我们提取出了id与iq的概念,根据永磁同步电机的运动方程,得出以下公式。

其中,Te为电磁转矩,Pn为极对数,Ld、Lq为直交轴电感,id、iq为直交轴电流,φ为永磁体磁链。可以看出当进行id = 0的控制时,iq与扭矩线性相关。

上图[3]生动形象地描述了永磁同步电机的控制。胡萝卜就是转矩电流iq,毛驴就是转子,与毛驴之间的距离就是控制角度。保持萝卜与毛驴的合适位置不变,毛驴就能一直向前。这也解释了磁场方向与转子的关系,即磁场方向需要始终和转子方向垂直,这样的转矩最大,过大或过小都会造成效率低下甚至控制发散。综上,我们只需要设计控制器,对同步电角度进行准确观测,对iq精准控制,就能实现对永磁同步电机转矩的控制。
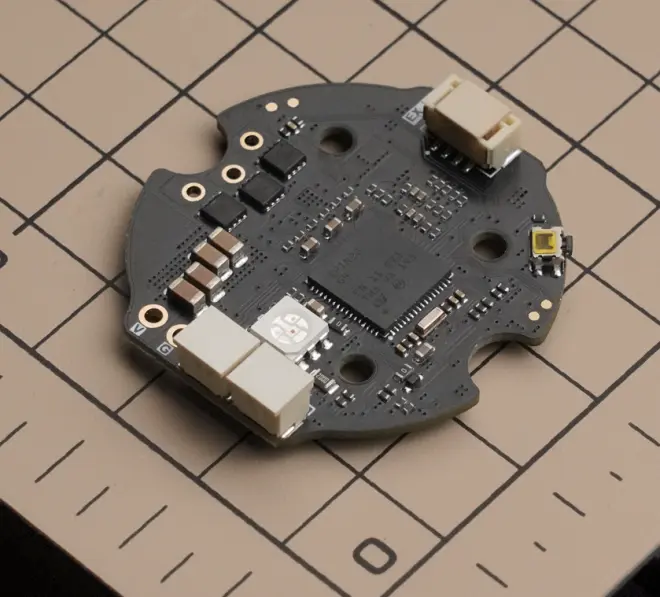
▌FOC驱动器
FOC除了算法本身,驱动器也是其中的重要一环,驱动器设计的优异,往往决定着电机控制的最终效果。驱动模块由以下器件组成:
主控:负责进行运行电机驱动算法,与其他设备进行通信。为了提高控制性能,更高芯片性能的代表能进行一个采样的FOC运算所消耗的时间越少,进行采样的频率能更高,所能输出的载波频率越高,电流高次谐波成分越小,电机运行更顺滑。且理论上一个电角度至少包含12次电流采样,所以更高的载波频率代表电机能达到的速度越快。部分主控带有电机专用外设例如差分运放、栅极驱动器、DCDC等模拟外设,能极大的节省PCB空间,降低BOM成本。
栅极驱动器:负责驱动NMOS,由于芯片输出PWM无法直接驱动MOS,需要自举电路,所以绝大多数需要单独的电机驱动。有些驱动集成DCDC、可编程运放,所以既是通用单片机也可以作为电机控制使用。
运算放大器:对于无运放的主控和驱动器,需要用分立元件搭建电流采样的运算放大器,对相电流采样电阻上的电压信号进行成比例放大。
MOS:主控通过控制场效应管和逆变桥式电路来通断来生成SVPWM波,从而产生正弦波电流驱动电机,选择MOS的Vds应当大于等于两倍额定电压,以防止反电动势击穿MOS。MOS是整个PCB的主要热源,选型时需要考虑好导通电流、耗散功率等参数,并对MOS进行适当散热手段。
编码器:对于伺服有感应用,编码器必不可少,通常使用磁编作为无刷伺服编码器,且编码器分辨率理论上越高越好。
除了上述硬件外,各种硬件设计也决定着性能的优越与成本的高低。例如单电阻与多电阻采样等。
▌总结
借助FOC优越的控制性能,使得机械臂等作业机构能够通过力控来更好地完成作业任务。当然,本文只是对FOC的核心思想和驱动器进行了简单的介绍,实际应用过程中的细节远不止此,如有机会我们以后探讨,敬请期待!
参考资料
[1]https://www.unitree.com/cn/products/Z1
[2](T-motor-更安全的动力系统 (tmotor.com))
[3]来自百度图片

本文共2007字
由西湖大学智能无人系统实验室工程师马昭原创,
申请文章授权请联系后台相关运营人员。
▌微信公众号:空中机器人前沿
▌知乎:空中机器人前沿(本文链接:https://zhuanlan.zhihu.com/p/532802674)
▌Youtube:Aerial robotics @ Westlake University
▌实验室网站:https://shiyuzhao.westlake.edu.cn/

