
分享 | 串联机械臂的结构设计及运动控制

随着“中国制造2025”的不断推进,工业发展的脚步将会越来越快,在这个过程中,工业机械臂占据着不可动摇的地位,工业机械臂的使用率直接影响着工业发展的速度,所以对机械臂的研究要放在重中之重。

机械臂是具有模仿人类手臂功能并可完成各种作业的自动控制设备,这种机器人系统有多关节连结并且允许在平面或三度空间进行运动或使用线性位移移动。构造上由机械主体、控制器、伺服机构和感应器所组成,并由程序根据作业需求设定其一定的指定动作。

目前机械臂是在机器人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、商业、农业、医疗救援、娱乐服务、军事、甚至在太空探索等领域中都可以使用。

本文将以串联机械臂作为研究对象,来分享一下串联机械臂的结构设计及运动控制。

一、串联机械臂的结构设计
该项目利用探索者平台制作。以6自由度串联机械臂为例,其驱动系统采用大扭矩舵机和小扭矩舵机、执行末端为夹持机构。【详细的样机组装步骤图可加QQ交流群:221964861进行获取】

二、串联机械臂的运动算法
串联机械臂的运动控制有两种,一种是正运动控制,一种是逆运动控制。
(1)串联机械臂正运动学
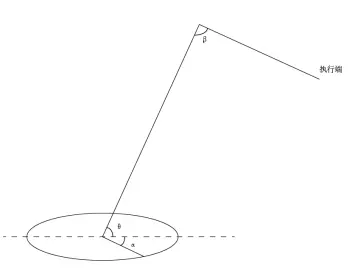
串联机械臂的正运动简单来说是指确定每个关节舵机转动的角度,从而确定机械臂端点位置。这种方法在调试时对于少量自由度的机械臂比较实用,但是当自由度增加时,调试复杂程度也会随之增加。比如下方这个3自由度机械臂(不含执行器),我们只需要确定其3个关节上的舵机转动角度α,θ,β,即可确定执行端的位置(暂时不考虑臂长的因素)。
串联机械臂的逆运动学简单来说是指确定端点的位置,然后通过算法计算出各关节需要转动的角度自动调整到合适的位置。
这里给大家介绍一种三自由度机械臂(不含执行器)逆运动的算法:建立一个以底部自由度运动中心为原点空间直角坐标系,将3自由度机械臂放置到坐标系中,将原点与端点的空间连线投影到xy平面上,已知机械臂臂长和端点坐标,通过三角函数推导出各个关节所需转动的角度。


在上面的公式中,我们已知量是端点坐标(X3,Y3,Z3)与臂长a,b,需要求解出θ5,θ2,θ1。该公式也可以逆推用于3轴机械臂正运动学计算。

一、主要使用的器材
主控板、扩展板、舵机、锂电池。

二、电路连接
按照下图中的舵机接线进行电路连接:由下至上4、7、11、3、8、2。


实验功能:实现六自由度串联机械臂搬运的效果。
将以下参考程序下载到主控板中,下面提供的是 main.c 的代码。【详细的程序源码可加QQ交流群:221964861进行获取】





