
全驱动无人机优化
一、介绍
传统四旋翼飞行器的欠驱动特性给作为传感器或操纵平台的某些应用带来了缺陷。基于空中物理交互的需要,开发全驱动的空中平台的研究得到发展。任何完全驱动的无人机都必须至少有六个执行器,但执行器的排列是可变的。
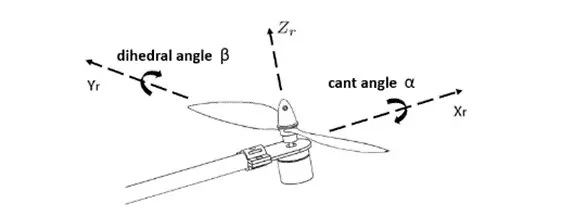
实现全驱动无人机的一种方法是固定倾斜旋翼,使它们不都是平行的。如图1,螺旋桨可以绕径向轴倾斜,称切向倾斜角α;也可以绕着垂直于径向轴的轴倾斜,称二面角β。
二、优化
2.1 模型
不考虑系统气动影响的情况下的影响,分析普渡的灵巧六旋翼和CyPhy Works LVL 两种全驱动无人机的模型,如图2和图3 。
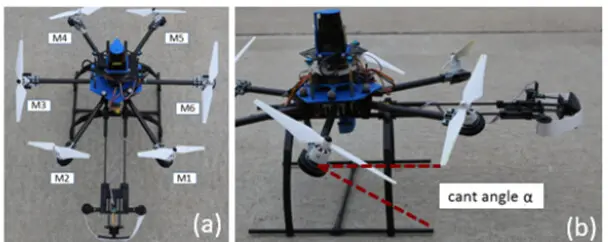
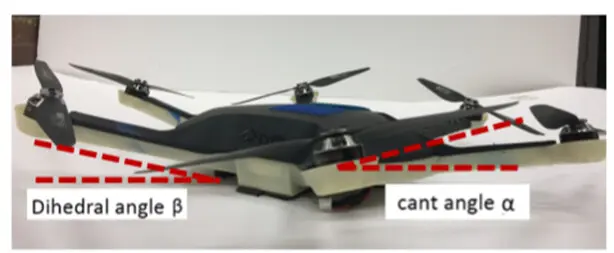
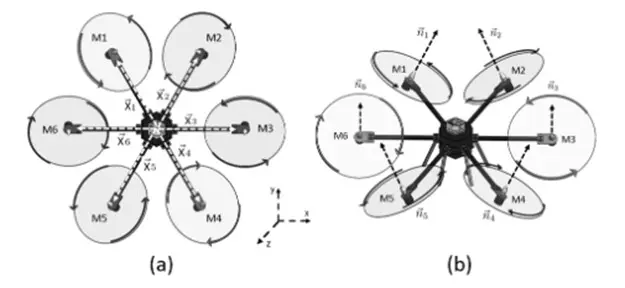
图2中的切向倾斜角α均为28度,图3中的倾斜角α和二面角β均为15度。从数学上讲,在进行二面角β旋转之后,将倾斜角α应用于新的机体框架,旋翼的几何分布如图4所示。
旋翼在自由空气中产生的稳态推力和阻力可以用以下模型来描述:

那么广义净力f和力矩τ可以表示为
从旋翼转速的平方到广义力/力矩的一般映射M可以导出为:

2.2 数值估计
这里将介绍了一种非平行高空平台相关性能的数值估计方法,即作用力和效率。在力控制中,应用定量测量来表示执行器的权威性和带宽。然后对无人机的效率进行讨论。
A.施力
施力的目的是在特定的端点施加力/扭矩。因此,将无人机平台建模为一个推动自身与环境对抗的执行器。

以图5所示的基于接触的传感和检测任务为例,无人机可以建模为质量,采样机构可以是在图6.a中具有刚度和阻尼值的刚性机械臂。无人机本身也是执行器,它以执行器指令为输入,输出执行器的作用力。
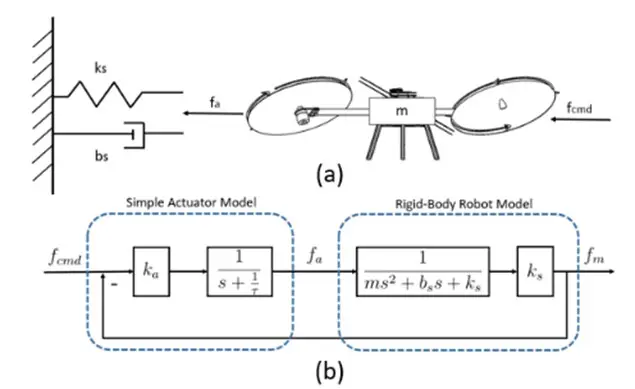
(a)具有刚性环境的刚体模型 (b)执行器带宽限制框图
无人机作为执行器,在带宽和工作量方面都是有限的。其带宽由推进器的响应决定,并受螺旋桨惯量和螺旋桨动力学的限制。它的作用也源于推力,并受到最大推力和相对于螺旋桨配置的推力分布的限制。
如果将执行器建模为一阶滞后,并将其与刚性机器人模型耦合,如图6.b所示。从输入执行器指令到输出力传感器的开环传递函数变为三阶。耦合执行器增加的第三极点会影响刚体机器人模型的响应,使闭环系统在高增益时不稳定。因此,与不完善的执行器耦合的系统在带宽上是有限的。此外,除了带宽的限制外,由工作限制引起的非线性饱和效应对系统的响应也往往是重要的。
1) 执行机构带宽:
多旋翼的执行系统包括电机和螺旋桨。执行系统的动力学不仅包括电机,还包括螺旋桨的空气动力学。
电机的动力学和螺旋桨的阻力:
执行系统的响应可以用方程7来描述:

系统在工作点处可以线性化,时间常数为:

工作点可以定义为悬停时的螺旋桨速度。执行器带宽随着执行器时间常数的减小和工作点的增加而增加。因此,执行机构的带宽将与悬停时的螺旋桨速度有关。
对于给定的平台,所有推进器的能力是固定的,转速被限制在0到最大值的范围内,因此最大广义力/力矩是有限的,但推力在每个轴上的广义力/力矩的分布随着推进器结构的不同而变化。
最大悬停状态下沿X轴方向的力可以通过解以下方程得到:

为了可视化任意方向上的执行器的限制,绘制了力/力矩椭球,如图7所示:
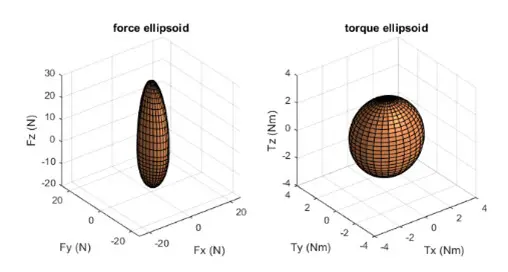
这些椭球体的半径由沿三个主体轴的两个方向的最大力/力矩定义。椭球体还提供了机体框架中任意方向上的广义力/力矩向量的大小的图示。
对于需要在平面内施力的任务,为了优化力和力矩,施力的成本函数为式(10)。用力/力矩椭球体的二次平均半径来表示在平面上的作用力能力。为了优化其他任务的力和力矩,可以选择不同的力和力矩组合。
B.效率
具有非平行驱动机构的无人机的效率随着旋翼配置的不同而变化。为了产生相同的升力,更大的倾角需要更大的推力。因此,当倾斜角度增加时,无人机需要更多的动力来保持在空中。有效载荷能力还与旋翼结构有关,与效率成正比。假设无人机在整个飞行期间保持悬停,所有旋翼以恒定速度旋转,可以得到多旋翼效率的近似值。那么无人机在飞行中的总能耗可以描述为:

式中,W是所有电机所做的功的总和,FM是品质因数的常数,Pi是电机i的功率。
如果最大效率定义为零倾斜,则符合常见的四旋翼或六旋翼。然后,非平行驱动机构的无人机效率定义为:
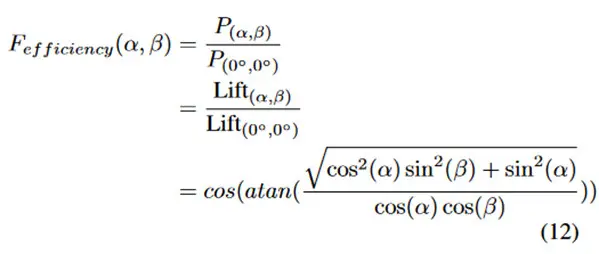
其中P(α,β)是旋翼配置为(α,β)的所有旋翼消耗的总功率。Lift(α,β)等于z轴上所有推力的分量。
当α或β中的任一个不为零时,效率(α,β)<1。非平行驱动机构的无人机的效率总是低于普通的四旋翼或六旋翼。与欠驱动配置相比,全驱动配置(45◦,45◦)将导致50%的效率。
2.3 旋翼结构优化
这种类型的多旋翼放弃了效率,以便拥有作为全驱动平台执行的能力。但在无人机中,飞行时间是至关重要的,特别是悬停的多旋翼。因此,为了平衡非平行驱动机构的效率和效益,一个优化度量是很重要的。
对于给定的全驱动或过驱动平台,大多数部件都是固定的,如机架、电机、螺旋桨、控制器、传感器和电池。在飞行前需要确定和配置的一件事是旋翼构型:切向倾斜角α和二面角β。
对于多目标优化的常用方法,如加权求和法,优化问题可定义为:

受制于
其中F(α,β)是目标函数之和,Fi(α,β)是作用力和效率的目标函数,α,β是倾斜角和二面角的决策变量。Lif t(α,β)等于z轴上所有推力的分量。
来考虑用于接触式传感和检测演示的灵巧六旋翼原型,建了两种配置。一个用于测
绘,另一个用于物理采样。
对于采样的配置,物理采样任务在平面内施力的能力。因此,对x轴和y轴上的力的施加进行了优化,然后是效率。飞行时间是关键,而在飞机上施力移动的能力是次要的,但也是重要的。因此,优化了映射配置以提高效率,然后在x和y轴上施加力。
灵巧六旋翼的参数如下:
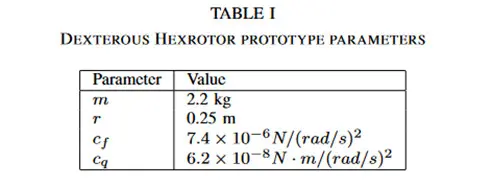
在给定该平台的情况下,对于约束(14)内的α和β的所有可能配置,可以对每个成本进行量化和标准化。如图8所示。Z轴上的值越高,表明在每个量化测量中的表现越好。
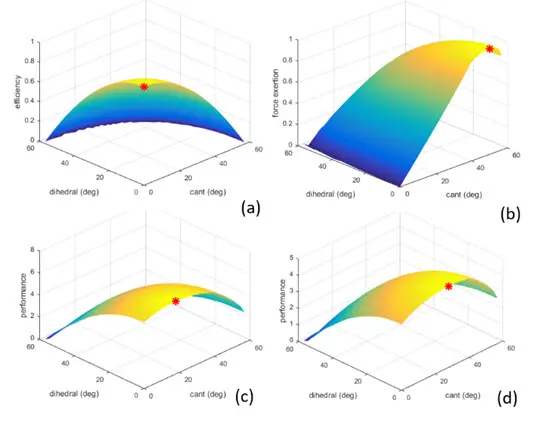
从图8.a可以看出,力的施加随着切向倾斜角的增加而增加。在零切向倾斜角和二面角时效率最高,如图8.b所示,当切向倾斜角或二面角增加时效率降低,如图8.c所示,在施力和效率之间存在权衡。因此,对于基于接触的传感和检测任务,对效率进行优化得到18◦切向倾斜角和0◦的二面角的配置。如图8.d所示,采样任务的优化(施力优化)给出了28◦倾斜度和0◦二面体的配置。
三、总结
从优化结果可以看出,切向倾斜角和二面角对性能的影响是不同的。在平面受力中,倾斜角贡献最大。二面角在力空间中的跨度不像斜角那么大。在效率上,倾斜角和二面角的贡献是相同的。
单纯选择倾斜角或二面角倾斜旋翼,或者两者都选择,对全驱无人机来说,哪种方式才是最优。单纯从产生多向推力的角度来看,只需要沿径向轴倾斜α(切向倾斜角)就足够了。
第二部分中对切向倾斜角和二面角对飞行的效率和对外施力的能力建立了一套完善的评价方法。切向倾斜角和二面角对性能的影响是不同的;在平面受力中(与环境产生交互力),倾斜角贡献最大。二面角在力空间中的跨度不像倾斜角那么大。在效率上(产生升力的效率,飞行时长),倾斜角和二面角的贡献是相同的。因此,在效率和施力的成本函数的情况下,二面角总为零。
由此带来的启示是,如果要设计倾斜旋翼的全驱平台,尽力选择切向倾斜角α进行优化,甚至可以不选择二面角β(β=0)。此外,可变倾斜旋翼无人机是另外一种优化路径;在追求续航时,使切向倾斜角α=0,将飞行平台变为欠驱平台 ,推力全部为升力;追求对外施力效果时,使切向倾斜角α变大,在水平面上产生更多的推力分量。
参考文献【1】Jiang G, Voyles R, Sebesta K, et al. Estimation and optimization of fully-actuated multirotor platform with nonparallel actuation mechanism[C]//2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2017: 6843-6848.
