
《ROS机器人编程》第十三章_机械臂
更新!整理出《ROS机器人编程》第十三章ppt讲义版,请对照书籍P398-455页学习。
本书最后一个章节,如果你在技术上有任何疑问,欢迎给小编留言哟。



【说明】机械手臂(Manipulator)是为了在工厂里执行简单重复任务而设计的机器人。它的目的是取代危险的工作或取代重复的任务,最近有许多有关机械手臂和人的协作的研究。

【说明】随着人机交互(Human Robot Interaction,HRI)的研究活跃起来,机械手臂不仅应用到了工厂,还与多种领域(Media Arts、VR等)结合,为大众带来了新的体验。数字舵机和3D打印技术的结合正在提高机械手臂对公众的接近度,这给了制造商和教育行业巨大的期待。一方面,机械手臂和人工智能的结合使很多人带来了大规模失业的恐惧。但是,机械手臂长期以来一直是使社会富饶的工具之一,当今也在许多不同的领域帮助人们。未来如果机器人的发展能够渗透到我们的生活中,而不会摆脱其本质,那么像扫地机器人一样,机器人将成为我们生活的一部分。
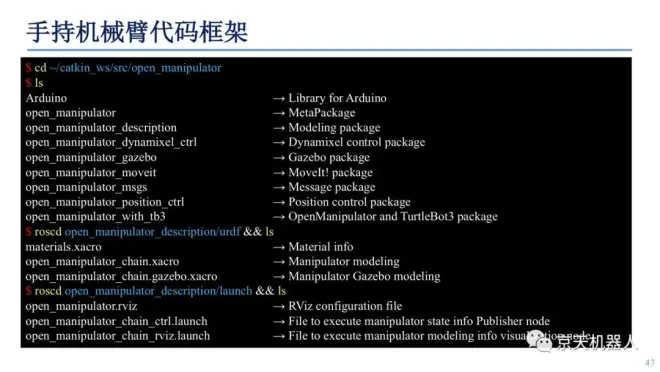
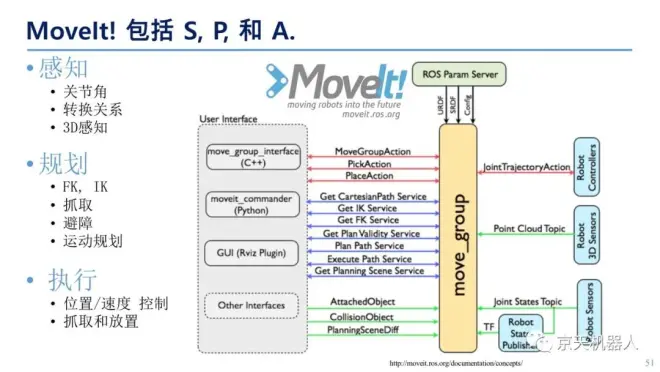
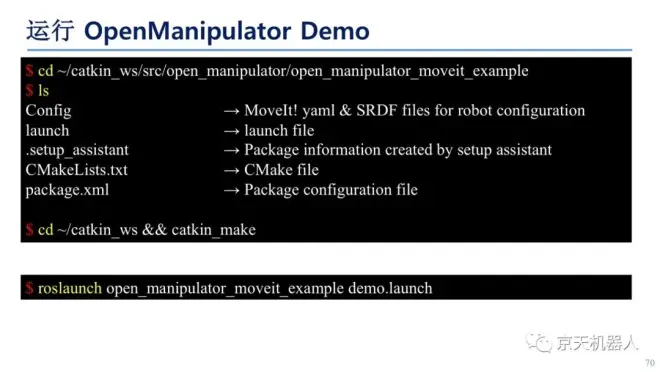
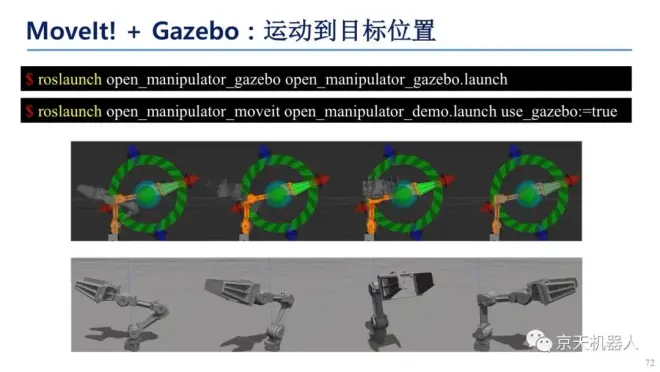
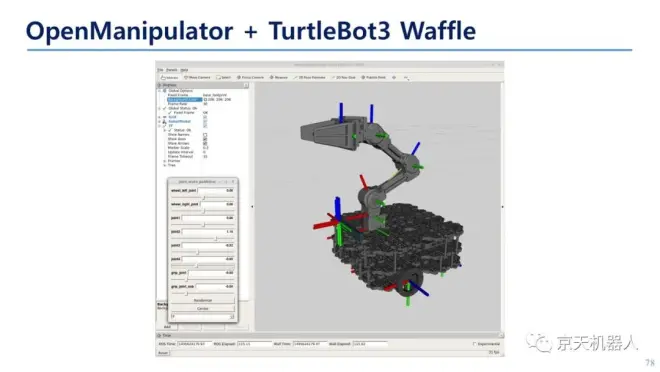
今后,我们将介绍机械手臂的结构和ROS中提供的机械手臂的库。ROBOTIS的手持机械臂是支持ROS的机械手臂之一,其优点是能够使用Dynamixel和3D打印部件,因此可以以低成本轻松制作。我将以本机械手臂为例,介绍可以与ROS一起使用的Gazebo 3D仿真器,还会介绍用于机械手臂的集成库MoveIt!,并且讲解他们的使用方法。最后,我将讨论如何配置和控制实际的平台,以及OpenManipulator与TurtleBot3 Waffle Pi之间的兼容性。



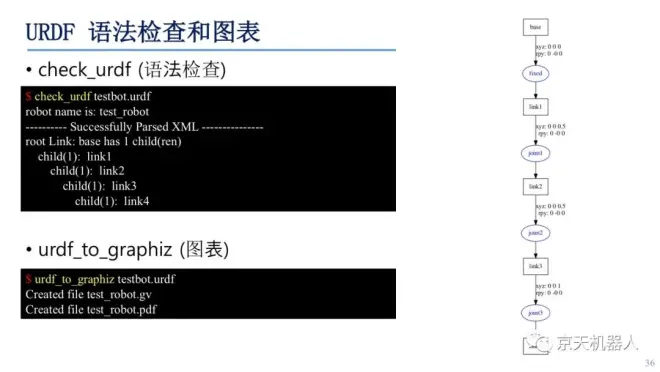
【说明】机械手臂的基本结构由基座(Base)、连杆(Link)、关节(Joint)和末端执行器(End-effector)组成





































































欢迎点击关注京天机器人专营店https://item.jd.com/10055225794502.html#crumb-wrap
原创声明:本篇文档为原创文档。欢迎转发转载,请注明出处。
本书中使用的开源代码会根据读者使用的时间,可能会有版本变化,因此在运行时可能会有相异的结果。
本次文稿编辑在原版上增加了开源软件列表,开源硬件列表,开源资源以及相关社区等链接,希望大家在学习ppt的同时可以参考原版书籍配合电脑实战,会更有帮助。
微信搜一搜:京天机器人。获取更多章节ppt讲义
