
我出书了!《视觉惯性SLAM:理论与源码解析》来啦(文末惊喜)

以下内容来自小六的机器人SLAM学习圈知识星球每日更新内容
点击领取学习资料 → 机器人SLAM学习资料大礼包
大家好,我是小六,今天隆重介绍下我的新书《视觉惯性SLAM:理论与源码解析》,这本书从疫情初期开始策划,历时2年半,中间历经坎坷,不过随着疫情阴霾散去,终于天朗气清,和大家见面啦!
先说说写这本书的初衷吧!目前SLAM相关的书籍比较少,虽然它们涵盖了该领域的核心知识点,公式推导严谨,有的还配套有重要概念的代码实现。但是,很多初学者在掌握了SLAM基础知识后发现距离真正的项目实践还有较大差距,他们对于如何开始自己的第一个SLAM项目实践比较迷茫。
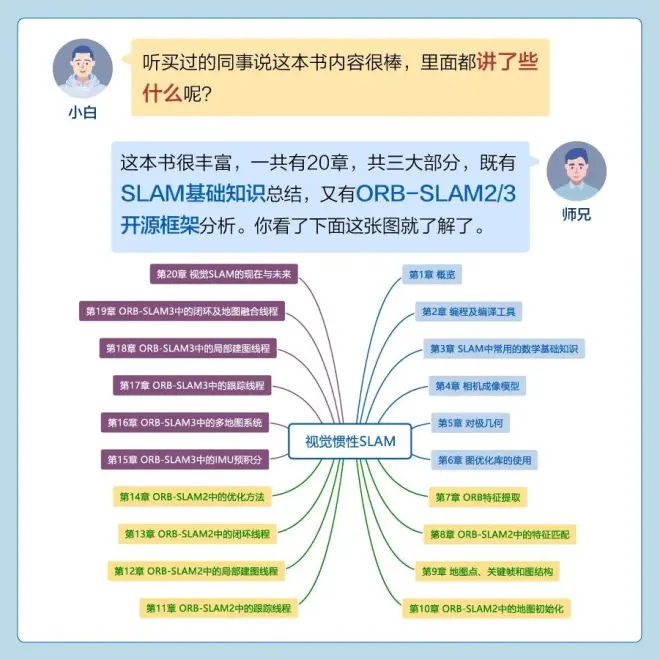
《视觉惯性SLAM:理论与源码解析》则致力于解决这个问题,本书选取了经典的视觉SLAM框架和目前综合效果最好的视觉惯性SLAM框架进行庖丁解牛,引导读者循序渐进掌握自己的第一个SLAM项目。
书的封面如下(封面是我自己设计的,有心的读者应该能看懂封面的含义吧?
)

本书特点
01. 第一本带领读者从头到尾学习一个完整的SLAM项目的图书。从原理解析、代码解读到工程技巧,一步一个脚印。

02. 本书从初学者的视角切入,部分章节以零基础的小白和经验丰富的师兄两人对话的形式阐述。对话形式一方面可以把初学者学习过程中的很多基础问题展现出来,帮助读者在学习过程中不断思考和提升,提高工程实践经验;另外对话这种口语化的表达方式能够让读者在轻松的氛围中快速理解专业理论知识。
03. 每个重要的知识点都尝试从三个角度去分析:“What (是什么?)”“Why(为什么?)”“How(怎么做?)”,让读者知其然也知其所以然。

04. 丰富的图示和类比。我们把大量复杂或难以理解的原理或流程绘制为具象化的图像,一图胜千言,极大降低了学习门槛。

05. 开源代码配套详细的中文注释。

06. 全书采用全彩印刷,提供极致阅读体验。

本书虽然是针对ORB-SLAM2/3系列的原理及代码解析,但其中涉及的知识点同样适用于其他同类算法,学习方法和思路也值得借鉴。
同时,本书也得到了业界专家的鼎力推荐

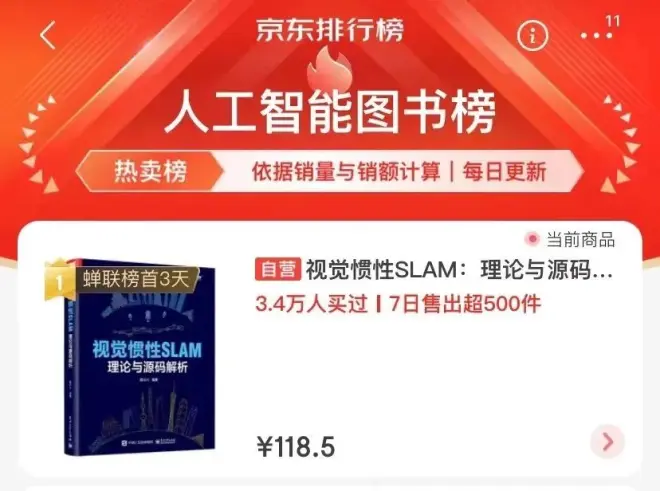
之前先在内部宣传了下,反响非常棒,在京东计算机类新书热卖榜蝉联榜首3天,感谢大家支持!
好消息1:14天新书学习训练营
我们策划了针对新书《视觉惯性SLAM:理论与源码解析》的系列学习训练营,对书中的三大部分开设学习训练营;预计3月中上旬启动第一部分SLAM基础知识训练营。
总共14天:每天学习书籍、提供配套讲解视频、课后作业,中间穿插直播。最后也会评选优秀学员进行额外奖励。
小六的机器人SLAM学习圈 星球成员均可免费参与(为保证学习效果,需要交押金,规定时间内完成课程任务后全额退)。
后续会开设多期,来不及参与的同学后面还有机会参加。针对本书第二、三部分的训练营我们会在第一部分结束后做,总之是一本买了不会亏的书。详细的介绍我们后续会再发布。大家先拿到书的可以先预习起来。
搜索公众号计算机视觉life,加入即可开始学习~3天内无条件退款
购买后务必加客服领取其他权益和加交流群
现在加入免费送2020-2022年SLAM答疑手册(126+356+313页)
好消息2:粉丝特惠价(限量)
我们向出版社申请了针对公众号粉丝的内部特惠价(5.7折,全网最低价),限额50本。先到先得。
获取方式1:+v:cvlife_tracy 回复:买书,额外赠送SLAM学习大礼包
说明
目前新书销售火爆,各地京东库存不多,需要的同学尽快下单。如果提示无货,可先预购锁定优惠。出版社已经加印,预计最多一周全国到货,介意慎拍。
我是小六,中科院博士毕业,计算机视觉life平台创始人,《视觉惯性SLAM:理论与源码解析》作者。机器人SLAM/三维重建/运动规划/标定等课程上官网 cvlife.net。学习愉快!
