
闭环系统的传递函数
前置内容
1)设输入信号函数为f(t),系统的冲激响应为g(t),则系统输出y(t)为f(t)与g(t)卷积。即:
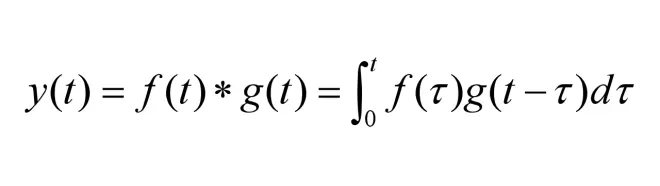
因为卷积过程过于痛苦,所以一般使用拉普拉斯变换计算,即:
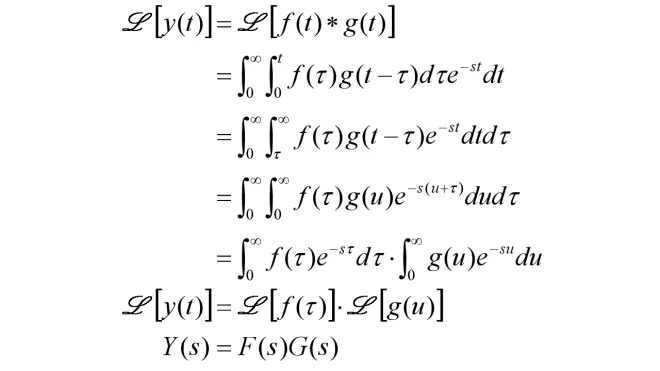
可以看到输入信号f(t)与系统冲激响应g(t)的卷积,等于输入信号的拉普拉斯变换F(s)与系统的传递函数G(s)的乘积。即化卷积为乘积,简化了运算过程。
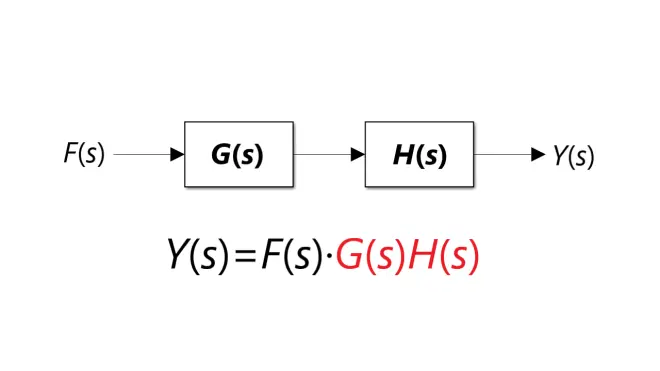
2)两个系统G和H串联时,输出y(t)为输入f(t)经过两个系统的卷积,根据(1)可得输出的拉普拉斯变换Y(s)为输入F(s)与两个系统的传递函数G(s)和H(s)的乘积,所以系统串联传递函数为G(s)H(s),即:
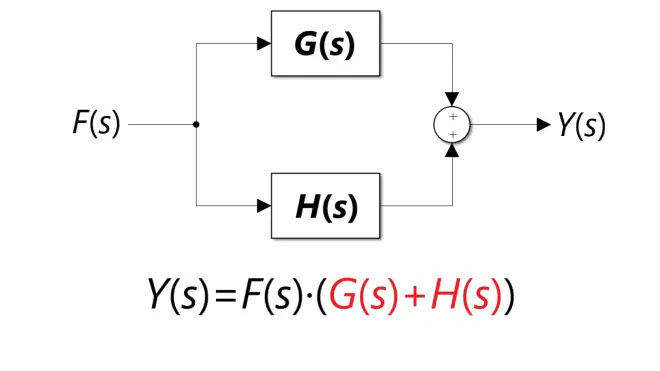
3)因为线性时不变系统满足叠加定理,所以两个系统G和H并联时,输出y(t)为两个系统的输出和,复频域上同理,输出Y(s)为两个系统的传递函数G(s)和H(s)的和,所以系统并联传递函数为G(s)+H(s),即:
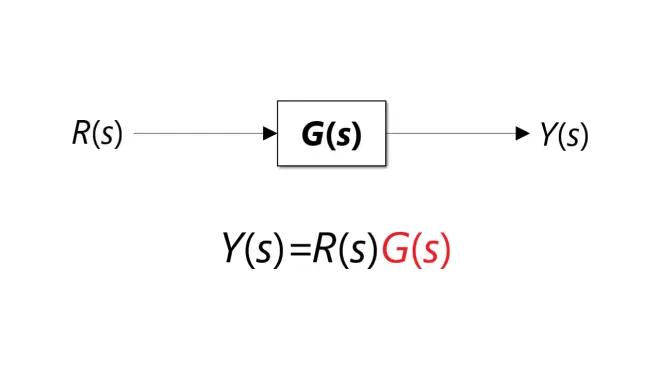
开环系统的传递函数(Open Loop Transfer Function)
开环系统的输出与输入有关,但输入与输出无关,因为没有反馈。设输入为R(s),系统传递函数为G(s),则输出Y(s)=R(s)G(s)。
闭环系统的传递函数(Close Loop Transfer Function)
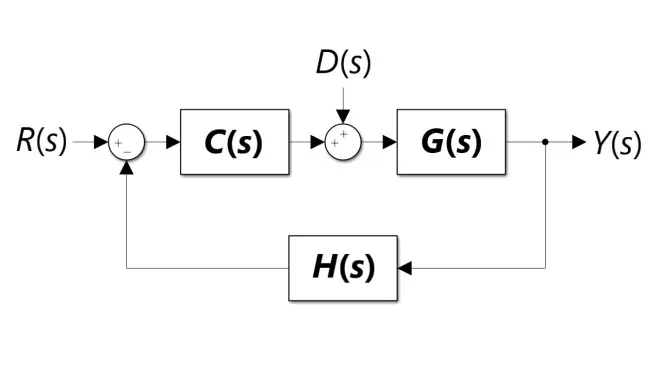
当输出回馈到输入时,系统成为了闭环系统。如图6所示:
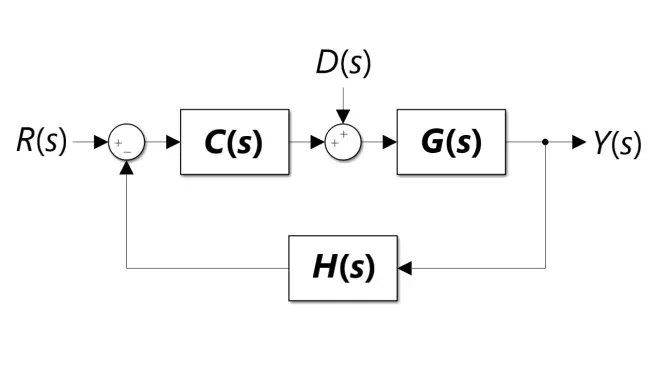
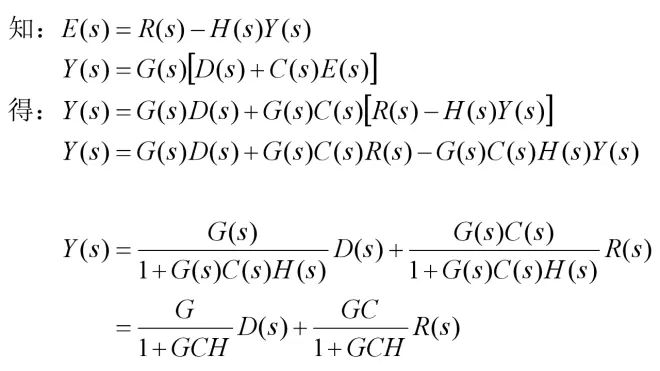
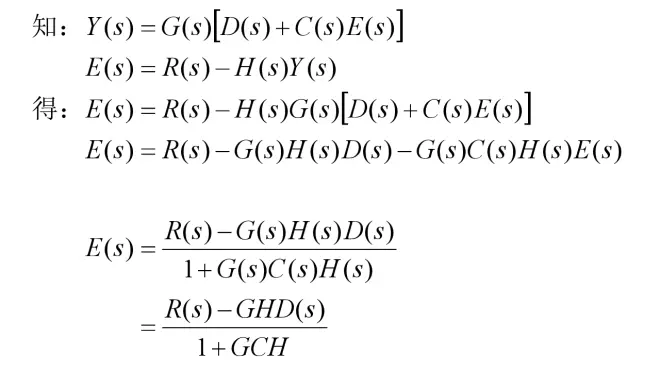
其中G(s)一般为系统本征传递函数(被控对象),H(s)为反馈系统传递函数(一般为传感器),C(s)为控制系统传递函数(控制器Controller)。R(s)为控制参考输入(Reference),D(s)为外界干扰输入(Disturbance)。Y(s)为输出。现求其传递函数:
PS:E(s)为误差(Error),为参考减去反馈的差值。
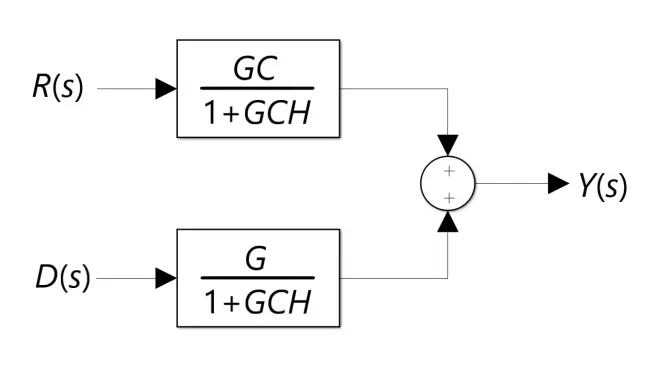
可以发现不同输入的闭环系统传递函数是不一样的。对于控制参考输入R(s),其传递函数为GC/(1+GCH);对于外界干扰输入D(s),其传递函数为G/(1+GCH)。其输出响应框图用下图表示为:
在忽略干扰输入D(s)的情况下,一些教材会系统G和系统C会合并成一个系统G,此时传递函数简化为G/(1+GH);一些教材会把H默认为1,而把C写作H,于是其传递函数变为GH/(1+GH)。
系统控制目标为,让输出Y(s)达到并跟踪输入R(s),且不受干扰D(s)的影响。系统G为被控对象,其函数往往与现实物理过程相关,而系统H和C是人为设计的。通过设计H和C来控制G使得完成控制目标。
除了关注输出Y(s),其误差E(s)(Error)也是值得关注的,它为参考值减去反馈的值,也就是控制系统C的输入,其表达式为:
一般情况下我们希望输出Y(s)达到并跟踪R(s),也就意味着误差E(s)=0。令E(s)=0有两种手段:
I:令分子等于零,即R(s)-GHD(s)=0;
II:令分母等于无穷大,即1+GCH=∞。
手段I有个问题在于,R(s)和D(s)一般是不可控的。因为R(s)和D(s)为系统的输入,不属于系统控制范围,除非R(s)=D(s)=0这种特殊情况,一般情况下分子是无法等于0的。而手段II中G、C、H都属于系统函数,特别是系统C、H都是人为设计的。所以可以使得1+GCH的值非常大以消除误差。
闭环系统的开环(环路)传递函数(Loop Transfer Function)
观察前文可以发现,不管是R(s)输入还是D(s)输入的闭环传递函数,亦或者误差E(s)的表达式,其分母均为1+GCH。这个式子极为重要,因为方程1+GCH=0为闭环系统的特征方程,它的根为闭环系统的极点,所以它代表着整个闭环系统的响应特性。但由于特征方程极难求解(在没有计算机的年代),所以工程师们一般关注的是开环传递函数(或者叫环路传递函数),即GCH。实际上,当把闭环系统的反馈通路切断时,其反馈输出就是GCH,如图10所示:
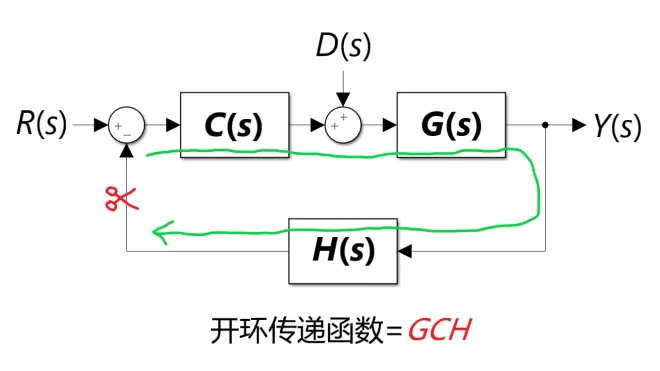
PS1:这里以输入R(s)为例。若以输入D(s)为例,其切断位置为系统C的输出端(加法器前),开环传递函数不变。
PS2:从图可以知道,其开环输出是指输入绕着环跑了一圈回到起点的输出,重点在“环”,其英文为“Loop”;而“开”表示的是切断回路,但英文的“Open”并无此意;“Open Loop”代表的是纯无反馈的开环系统。所以开环系统=Open Loop=G;闭环系统=Close Loop=GC/(1+GCH);闭环系统的开环=Loop=GCH。
在闭环系统中,开环传递函数没有具体的物理意义,因为实际操作中也不会切断反馈回路。但是开环传递函数比闭环传递函数好算,并且可以通过开环传递函数的性质推测出闭环传递函数的一些性质。在没有计算机的年代,就有科学家建立起这个沟通桥梁,如伊文思(w.R.Evans)的根轨迹法,奈奎斯特(Nyquist)稳定判据。
闭环系统稳态输出估算
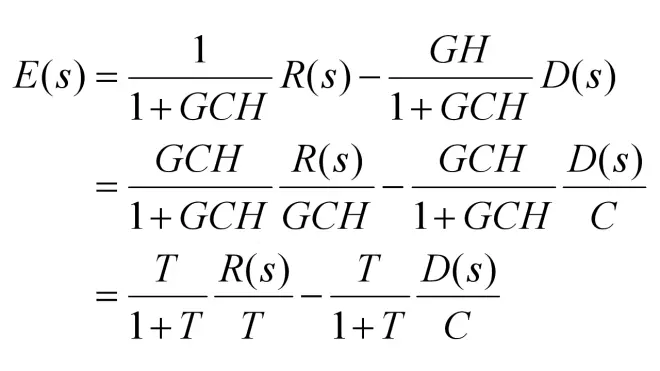
前文已经知道闭环系统的输出Y(s)=GC/(1+GCH)*R(s)+G/(1+GCH)*D(s),现在对其表达式进行以下处理:
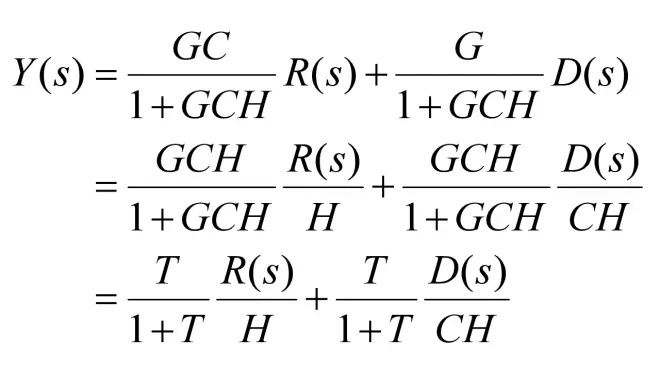
此处用T代表开环传递函数T=GCH。同理,对于误差E(s),也可将其表达式转为另一种形式:
当满足以下条件时,可以估算系统的输出Y(s):
I、闭环系统稳定,所有闭环极点均位于s平面的左半平面;
II、输入R(s)、D(s)为有界正/余弦波时;
III、系统已经过足够长时间达到稳态。
因为任何周期信号均可以用傅里叶变换拆解成无数个正/余弦波叠加(包括直流常数,为频率=0的余弦波cos(0t)),所以此分析基本涵盖了系统的稳态响应。
绘制开环传递函数T的幅值伯德图(Magnitude Bode Plot),一般情况下,可以发现在低频区|T|的值非常大,而高频区|T|的值非常小。随着频率从低频区到高频区逐渐增大,|T|的值逐渐减小,最终穿过0dB轴(|T|=1),其对应的频率为截止频率。于是可以粗略地估算低于截止频率和高于截止频率的输出Y(s)。
PS:|T|也叫做开环增益/开环放大倍数/Loop Gain。
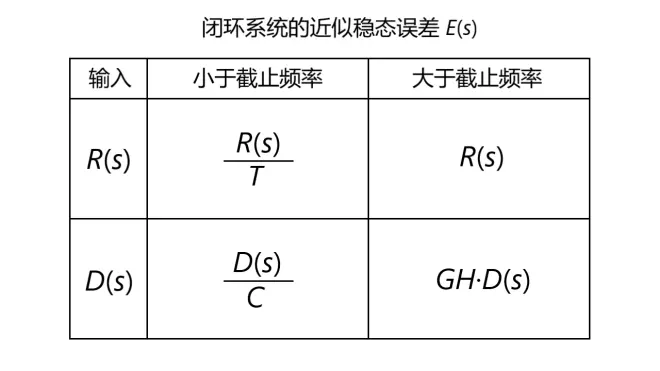
低于截止频率时|T|的值很大,当|T|>20dB(>10)时,式T/(1+T)可以近似等于1;高于截止频率时|T|的值很小,当|T|<-20dB(<0.1)时,式T/(1+T)可以近似等于T。于是可以得出闭环系统的近似稳态输出Y(s)而近似稳态误差E(s),如图13、14所示:
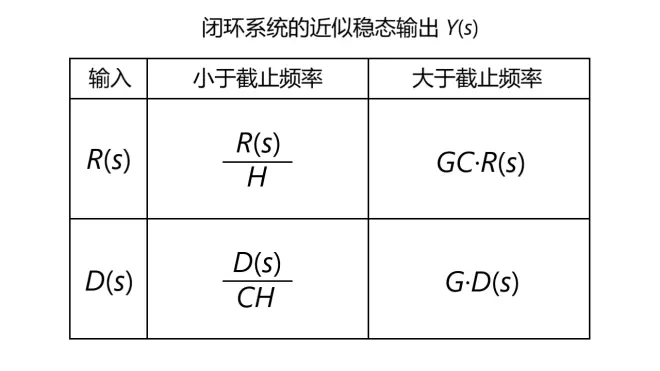
通过上图可以得出以下结论:
I、当输入R(s)的频率小于截止频率时,输出Y(s)仅与系统H(一般为传感器)有关,若H=1,则可以认为Y(s)=R(s)。
II、当输入R(s)的频率较低时,稳态误差E(s)为|T|的倒数。也就是说开环增益越大,误差越小。当开环增益足够大时,可以近似认为误差为零。例如我曾经做过一个输出36V的开关电源[1],直流开环增益|T|达到了120dB(1000000),意味着误差为36/1000000V。实际测试中精度0.001V的仪器都测不到输出偏差。
III、当输入R(s)的频率高于截止频率时,由于GC的值很小了,所以输出约等于零。误差就等于输入本身了。因此可以得出,闭环系统的输出基本能达到并跟踪截止频率以下的控制参考输入,但高于截止频率的控制参考输入则无响应。
IV、对于低频的外界扰动输入D(s)(比如重力),其导致的误差E(s)与系统C有关。若想误差为零,则需要C的值非常大(一般由积分器实现)。当C非常大时,就可以认为扰动导致的输出Y(s)等于零了。
V、对于高频的外界扰动输入D(s)(白噪声,自然界有的是),其输出Y(s)仅与被控系统本征函数G有关。一般来说系统G与自然界的物理过程相关,绝大多数自然物理过程对高频是不敏感的,所以可以认为高频下G的值非常小,全靠G来屏蔽扰动输入。
附:[1]--https://t.bilibili.com/499488800854365924
所以在设计闭环系统时对不同的输入情况,采取如图15所示策略:
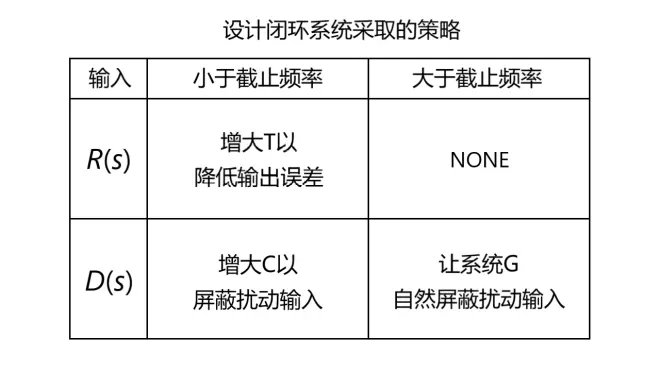
注意,这里策略只是一个定性参考,一般是设计好后反向校验的,具体设计值按照具体问题具体分析。同时提醒G、C、H是函数,不是常数,我只是省略了后面的“(s)”。让C等于超级大的常数来屏蔽D(s)系统基本会出问题。在以后的专栏中我会给出详细设计过程(如果有的话),本文先当个基础的认识。(完)
by HD-nuke8800
2022/4/24
