
单闭环直流调速系统设计仿真
设计要求

参数配置与建立模型
1、参数配置
新建一个ParameterConfiguration01.m文件
键入参数,如下
%% 电机模型参数
UN = 400;
IdN = 52.2;
nN = 2610;
Ce = 0.1459;
R = 0.368;
lambda = 1.5;
f = 8e3;
%% 电机时间常数
Tl = 0.0144;
Tm = 0.18;
alpha = 0.00383;
Udc = 538;
Ucm = 5;
Ks = Udc/Ucm ;
%% 给定电压
Un = 10;
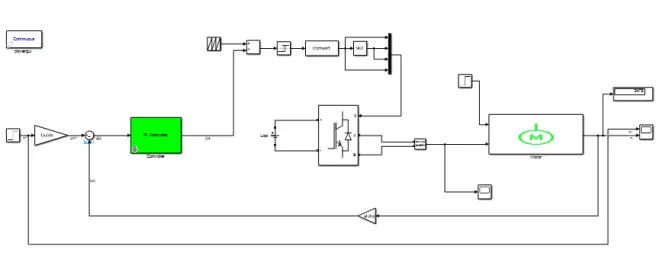
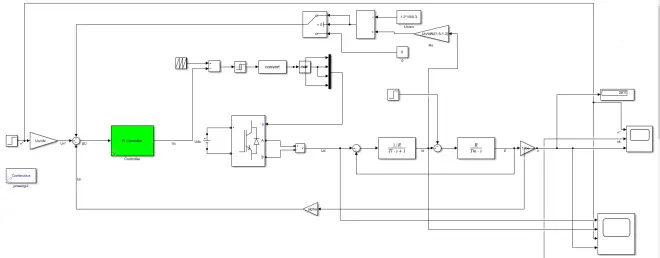
2、搭建模型
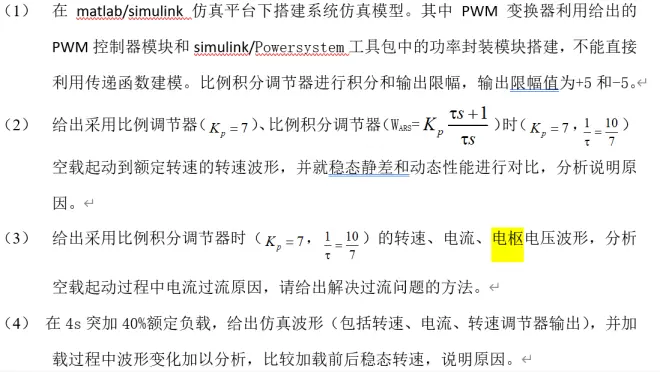
(1)电机模型
(2)PWM Converter
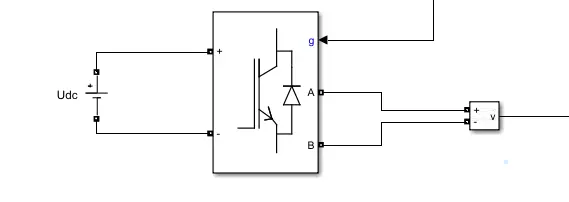
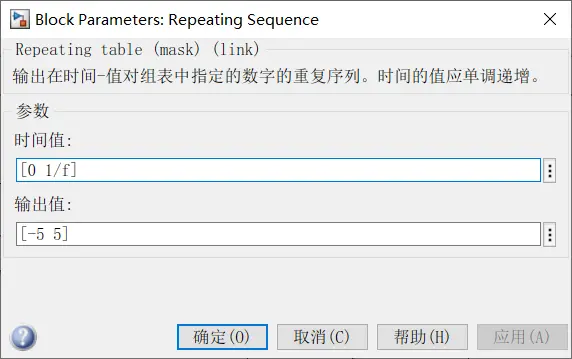
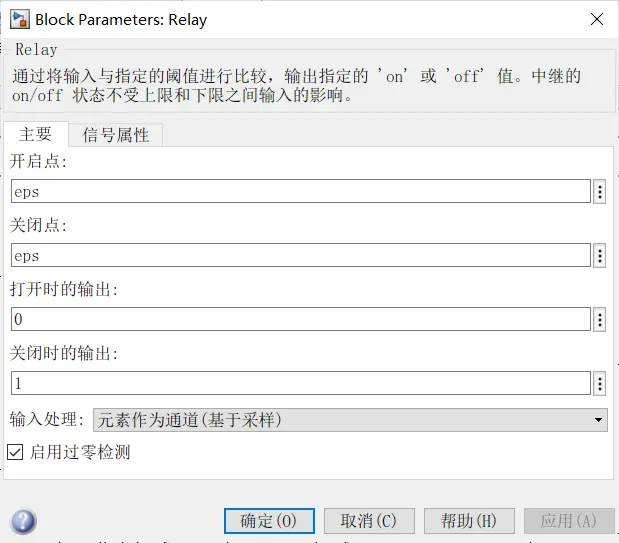
(3)PWM Generator
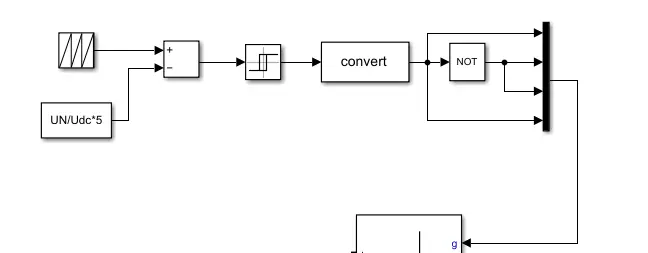
其中,
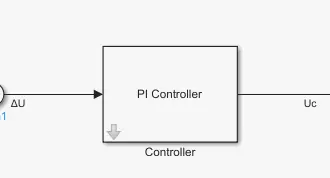
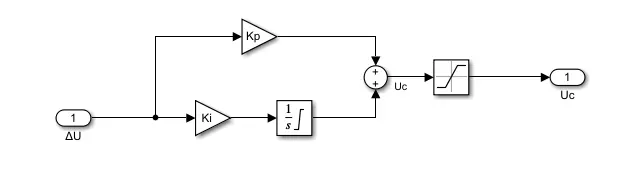
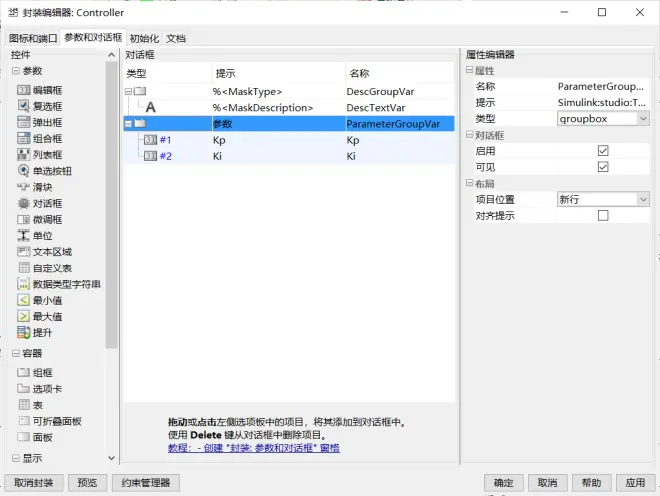
(4)Controller
建立子系统
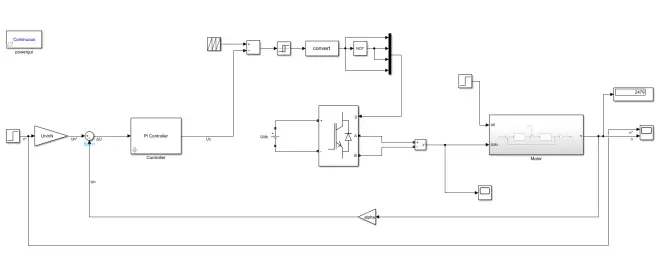
(5)整个仿真模型
仿真分析
(1)比例调节器Kp = 7
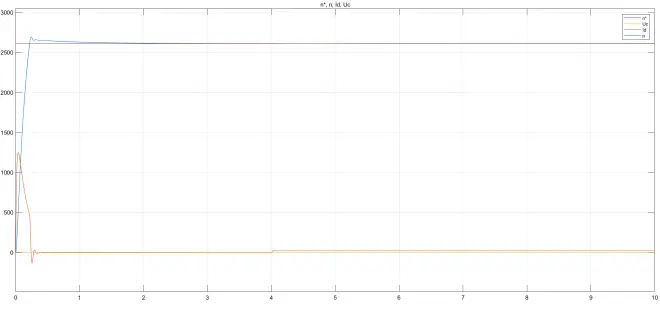
Kp = 7,Ki = 10 ASR 再以上两种参数下空载起动,
n*、nk、n分别为给定转速,P控制器下转速、PI控制器下转速
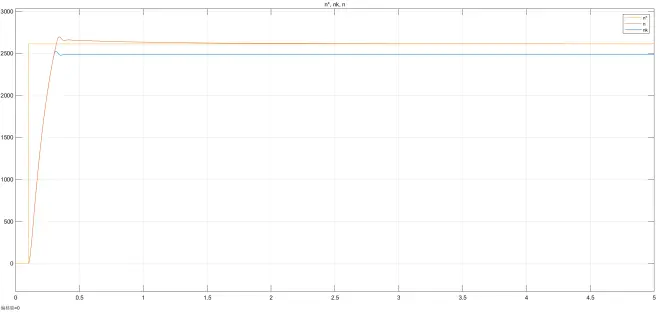
刚开始,主要由比例调节起作用,两种ASR动态响应一直,比例调节器很快达到稳态,而且有静差,但是响应较快,而PI调节器后期主要是积分调节器起作用,可以实现转速无静差带有超调,响应略慢
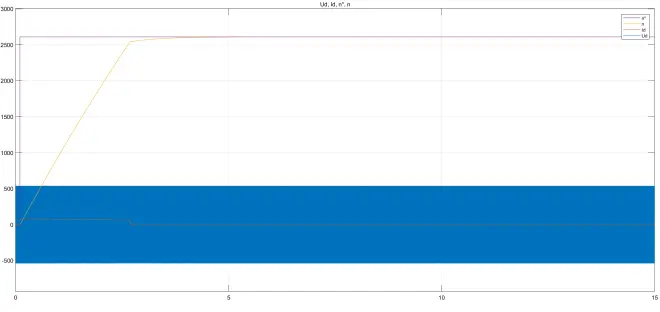
(2)未加电流截止负反馈时的过电流、电枢电压、转速波形
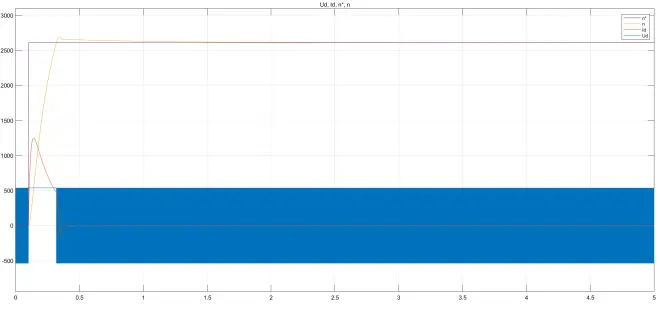
转速负反馈单闭环直流调速系统,ASR为PI调节器,可以实现无静差。但由于没有引入电流负反馈,在电机起动、制动、堵转时都会引起过电流。我们一般认为最大电流不超过1.5~2IdN。
在电机起动时,由于惯性,转速不能突变,反馈电压为零,偏差电压ΔU = Un*,由于放大器和变换器的惯性很小,电枢电压Ud很快达到最大值,对电机而言,相当于全电压起动,造成过电流。如图中部分Ud有一段为538V(黄线)。因此,我们引入电流截止负反馈。
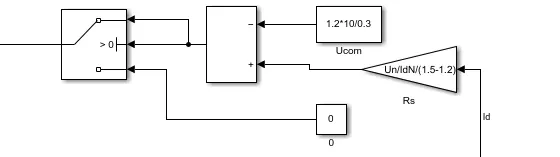
电流截止负反馈
此时,将仿真时间由5s设为15s
截止电流 Idcr = Ucom/Rs,大于电机的额定电流
Idcr ≥ (1.1~1.2)IN
允许的最大过载电流Idbr=(1.5~2)IN
Idcr = Ucom/Rs
Idbr ≈(Un*+Ucom)/Rs
联立上式可求得Rs,Ucom
引入电流截止负反馈,很好解决了过电流的问题,但是起动时间变长
(3)在4s突加40%额定负载
参考文献
陈伯时.电力拖动自动控制系统一一运动控制系统北京:机械工业出版社,2001
