
1.设计偏差——工创赛新能源车
偏差是简化的理想模型与复杂的四维时空的差距,如物体有质量,材料非刚性,车轮有厚度等。在控制理论中,控制信号输入-->参数运算&单位变换-->实际输出。偏差设计能改善“参数”的稳定性并使其趋近于理想值,同时削弱耦合性,进而使得输出趋近于理想值
通过分析曲率运动三要素:舵角、差速、侧倾,三者下的受力情况,定性地分析各种偏差,对参数(实际相对轮心位置、实际舵角)的影响,有方向地优化改善。(定量计算需要有限元分析,门槛很高)

1.1舵角
偏差一:转向传动系以及舵轮胎面受转向阻力,发生弹性形变,实际舵角滞后于理论舵角,轨迹曲率降低
1.使用共轴双轮系来减弱滑动摩擦;凸轮滚子改为滚动摩擦
2.用低摩擦系数的胎面材料;减小前轮承载力;增强转向传动系的刚性;
3.若滞后严重,可使用刚性的微调器件,减小凸轮平面到舵轮转向轴的垂直距离(等比三角形)
偏差二:凸轮与滚子磨损,导致推程偏小,回程偏大
1.滚子使用高硬度材料,凸轮使用低硬度材料,平衡寿命;点接触摩擦改为线接触摩擦
2.减小弹簧/橡皮筋的预紧力;减小转向阻力
3.使用润滑剂(选低粘度型,油膜薄,影响小);滚子改为滚动摩擦
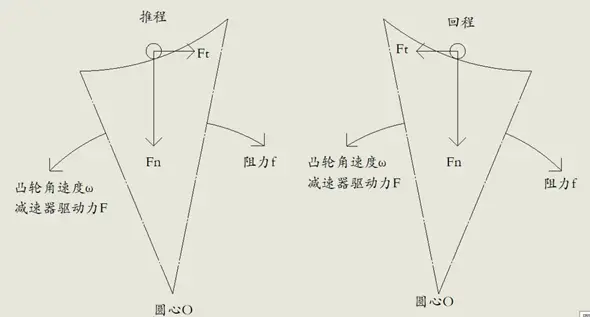
偏差三:如图1-1-1,滚子对凸轮施加的切向力Ft的方向会改变。
若Ft大到足以克服凸轮的总摩擦阻力f,则减速器对凸轮的驱动力减小,减速器轮齿间的弹性形变释放;且凸轮的角加速度α>0,凸轮相对于减速器加速,出现回程差。
1.减小回程时,舵轮的张紧力与转向阻力,以减小滚子对凸轮的切向力
2.对凸轮的圆周运动方向施加额外阻力
偏差四:对曲线运动进行微分,其向心摩擦力的增量,完全由舵轮提供;现有的向心力,在差速的耦合影响下,由各轮系分配提供。当舵轮摩擦力不足时,车身发生侧向打滑
1.减小曲率变化率;轻量化
2.给舵轮配重;使用摩擦系数大、附着力高的胎面材料;在胎面上雕刻子午线
1.2 差速
只有主动轮受驱动力直接影响,可视作线速度不变。舵轮的向心摩擦力,与主动轮的驱动力,产生的合力矩,使车身各微元获得相对于曲率中心的角加速度,进而产生差速。 (反过来看,若车身各微元的线速度按曲率半径分布,则车身在做曲率运动,例如坦克的左右履带差速转向)
偏差一:由于电动机的启动特性,启动时驱动轮的瞬时驱动力过大,舵轮的最大摩擦力不足以平衡其力矩,小车发生意外偏转
1.增大前后轮的轴距,以增大舵轮的力矩臂长;增大舵轮的最大摩擦力
2.减小后轮的左右轮的轮距,以减小驱动轮的力矩臂长
3.电机缓启动,减小驱动轮的瞬时驱动力
偏差二:车身受差速力矩发生弹性形变,车轮斜偏,各轮心相对位置改变。驱动轮处在曲率中心近端时,车身克服前进阻力被动加速,车身差速力矩较大;驱动轮处在曲率中心远端时,车身顺着前进阻力被动减速,车身差速力矩较小
1.轻量化;降低速度;增大车身刚性;增强车轮径向约束力
2.根据路径情况,例如右转偏多,则将主动轮布置在左后方,即曲率中心远端处。
3.使用差速桥,自适应地,从车身中轴线,向车身左右,双向分配传递差速驱动力
4.采用倒三轮布局,驱动轮在车身中轴线上,也是双向分配传递差速驱动力
5.使用机械传动机构,让凸轮同时控制滑动变阻器,来控制电机驱动器,线性地改变电机转速,即驱动轮线速度。主动匹配一定的差速量,并尽量使车身质心处的线速度不变
1.3 侧倾
曲线运动中,车身被动侧倾,来改变左右轮的压力分配。曲率中心远端的车轮所受的反向支撑力矩,与车身各轮系的向心摩擦力矩,二者平衡,则小车不发生侧翻;若失衡,则小车侧翻。
偏差:车身侧倾,各轮的承载力不同,各轮心相对坐标改变
1.降低车速;轻量化;提升车身刚性与装配约束强度
2.通过降低质心高度,来减小向心摩擦力的力矩臂长
3.通过增大左右轮的轮距,来增大反向支撑力的力矩臂长
4.在舵轮的转向轴中垂线前侧,固定一重物,重物随舵轮一同绕转向轴转动。转弯时,重物在车身总质心上,施加与向心摩擦力矩相反的重力矩。实现主动压弯,减弱侧倾
