
台风飞行手册节选翻译:31 雷达(1)
雷达(1B-B-93-10-00-00A-043A-A第005版)
概述
该雷达也称为“捕获器(CAPTOR)”,是目标检测、跟踪和交战的主要传感器。它是一种脉冲多普勒多脉冲重复频率(PRF)雷达,具有高度的自动化功能,可最大限度地减少飞行员的工作量,并在各种环境和目标条件下提供最佳性能。该雷达针对空对空目标提供空对空(A/A)搜索、锁定跟踪(LF)和空战模式(ACM)以及空对面(地)(AS)测绘。
该雷达支持有效使用空对空武器和27毫米内置机炮。
航空电子子系统的自动功能使飞行员能够专注于防空作战的主要需求,即检测目标、操纵飞机、发射导弹或发射机炮。手动油门和操纵杆(HOTAS)概念利用操纵杆和油门上的开关,允许飞行员在攻击的时间关键部分控制武器、传感器和显示器。目视检测到目标后,飞行员无需将目光移开或把手从油门和操纵杆上移开。
雷达采集由控制杆发出指令(空战采集模式或手动采集模式)。攻击转向信息自动显示在抬头显示器(HUD)和多功能抬头显示器(MHDD)的攻击格式(AF)上。飞行员使用抬头显示器(HUD)上的指令转向提示进入武器包线,发射机炮或使用操纵杆上的触发器发射选定的导弹。
雷达与敌我识别询问器协同工作,将接收到的识别与现有雷达航迹相关联。
雷达系统内置电子对抗措施(ECCM)。
通道操作
概述
雷达可以在
–固定频率模式,或
–频率捷变(agile)模式
在任务规划期间,可用的雷达信道(ps:等于通道,原文是channels)和频率模式可以为每个雷达模式单独预定义,并可以通过PDS(SMD)加载到地面。PDS将覆盖以前的频率设置。
雷达信道也可通过MDE在飞机上进行修改,频率模式可能不会。
固定频率运行
雷达可以使用固定信道(分类),必须从启用(加载)频率集中选择。如果没有加载通道集,则可以使用完整的通道集。雷达需要至少两个信道才能工作,因此必须选择信道对(信道a和信道B),信道对之间有定义的信道间隔(分类)。
为了减少杂波的影响,可以通过MDEF修改固定频率信道。当需要输入新的信道对时,必须考虑信道被(分类)数量隔开。
频率捷变(FA)模式
雷达可以在任务规划期间定义的一组加载信道(称为启用信道)上以多种频率捷变(FA)模式(分类)运行。
脉冲重复频率(PRF)
对于空对空作战,该雷达为查找和俯视的各个方面提供检测、快速捕获和跟踪能力。这是通过自动机械化不同的脉冲重复频率(PRF)模式、高(HPRF)、中(MPRF)和低(LPRF)来实现的。请注意,除了选择某个雷达模式外,没有手动选择PRF。
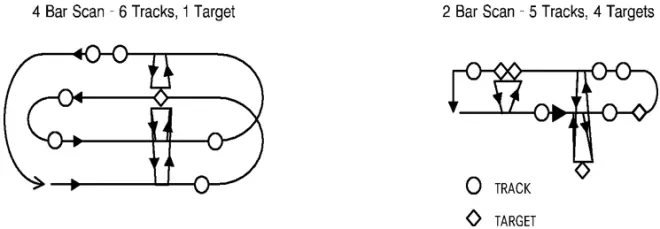
扫描
天线可动范围限制
雷达天线在方位+/-70°和仰角+/-60°范围内以电力驱动。方位角和仰角限制参照飞机的机身参考线(FRL)。

扫描行有一点重叠,以确保扫描行之间的扫描没有任何间隙(参考图1.237)。
组件
雷达由以下子系统(LRI)组成:
–扫描仪(SCA)
–处理器(PROC)
–发射机辅助装置(TAU)
–发射机功率放大器(TPA)
–接收器(RXR)
–波导管单元
雷达(1B-B-93-10-00-00A-112A-A第005版)
概述
雷达提供以下模式:
–空对空模式(A/A),包括空战模式(ACM)
–空对地模式(A/S),(仅限RBGM)
空对空模式
雷达在以下空对空模式下工作:A/A搜索和跟踪模式
–边扫描边跟踪(TWS)
•自适应波形调度(AWS[Adaptive Waveform Scheduling])
•优先级搜索(PS)
•优先级跟踪(PT)
–速度搜索(VS[Velocity Search])A/A锁定跟随模式(LF)
–单目标跟踪(STT)
–视觉识别(VISident)
–机炮
空战模式(ACM)
–从属采集(SACQ),
–垂直采集(VACQ),
–HUD采集(HUDACQ)
其他修改(Additional Moding)
–Raid模式
–雷达隐身模式
–区区域获取(可在更高的飞机标准中使用)
–非合作身份(NCI)(适用于更高的飞机标准)
空对地模式
–实波束地面测绘(RBGM)
A/A搜索和跟踪模式
在空对空任务中,雷达可以根据“距离”或“速度”探测来搜索航迹,也可以跟踪同时考虑“距离”和“速度”的探测。
跟踪不仅涉及先前检测与当前检测的关联,还涉及预测轨迹的下一个检测位置。这使得速度和距离门能够被利用,从而提高跟踪信息的准确性。
扫描时跟踪(TWS)
TWS是最重要和最常用的雷达搜索模式。它检测并自动跟踪机载回波,并提供跟踪范围、方位、速度、高度、航向、近似RCS和方位角的输出。通过从任何其他主模式中选择MHDD/ATCK格式上的TWS,即可直接输入TWS,即与TWS需求被打破之前的任何现有锁相比,雷达在搜索状态下启动TWS操作。
TWS模式的主要功能是提供中远程态势感知。TWS需要在大扫描量上同时提供目标检测和跟踪。TWS模式利用原始命中检测数据构建多个目标航迹,同时雷达继续提供搜索能力。TWS多目标跟踪能力取决于帧时间和扫描量之间的权衡。扫描量和扫描中心可由飞行员手动定义。当选择自动扫描对中设备(ASC)或当航迹被指定为目标时,扫描中心也由雷达自动控制。
当选择扫描居中(自动/手动)选项且未指定目标时,将根据攻击格式上的选定范围自动调整仰角条。
选择TWS后,雷达能够跟踪多达20条航迹,并随后检测和显示180个额外的绘图。当检测到目标并且雷达有足够的数据时(即雷达在四个连续帧内至少检测到两次目标),它将形成一条轨迹。这些地块将在一段时间内“淡出”并消失。淡出率通常由雷达自动控制,但飞行员可通过MHDD上的软键选择来改变淡出率。自动绘图淡出时间将等于扫描体积时间的2.5倍,可以为每个检测到的对象显示2或3个绘图。
在TWS中,雷达自动控制发射波形(PRF),以在各种条件下提供最佳雷达性能。例如,当俯视表面时,通过使用中高PRF波形的组合来增强杂波抑制,而仰视使用中低PRF波形的组合来优化检测性能。
为了优化TWS模式(PRFs)的运行,以跟踪或搜索以下附加模式:
–自适应波形调度(AWS),可通过SK SRCH-AWS/PS/NORM进行选择
–优先级搜索(PS),可通过SK SRCH-AWS/PS/NORM进行选择
–优先级跟踪(PT),由系统自动选择
自适应波形调度(AWS)

在AWS中,雷达使用针对目标跟踪精度和抗干扰性优化的波形,同时仍保持远程检测能力(见图1.247)。AWS是选择TWS时的默认模式,如SK SRCH/AWS上所示,AWS已装箱。
在PT中,AWS也自动用于轨道向目标的偏移。
优先级搜索(PS)
在PS模式下,雷达使用经过优化的波形,以便在现有航迹之间对新目标进行远程检测。预计使用PS将允许在比AWS更大的范围内进行目标检测(在ATK格式上显示为绘图),但跟踪相关性和跟踪维护可能不太有效。使用SK SRCH/AWS选择PS,然后显示SRCH/PS(PS已装箱)。
注意
事项
PS仅在TWS中可用。当雷达进入PT时,PS不可用。
优先级跟踪(PT)
目标被指定或参与TWS后,雷达自动进入优先跟踪,其中多达六个目标以更高的速率更新(即使在实际雷达搜索区域之外,但在雷达常平架限制范围内),这将产生更稳定的航迹,并大大减少与保持指定目标的雷达仰角覆盖相关的工作量(见图1.239)。
优先跟踪主要用于支持AMRAAM飞行中的目标,优先于其他DTL目标。
在PT中,雷达还使用数据自适应扫描(DAS),这是一种在雷达内完全自动的设施,每当指定目标移动到雷达的仰角或方位角扫描体积覆盖范围之外时,就会实施该设施;在随后的扫描中,雷达在目标方位角处短暂暂停,扫描仪在继续设置的扫描模式之前短暂指向目标的仰角。结果返回用于保持TWS对目标的跟踪。
请注意,自适应扫描仅用于多达六个指定雷达目标。如果非目标航迹移动到仰角扫描覆盖范围之外,雷达将丢失这些航迹。
注意
事项
雷达优先跟踪时,“搜索优先”选项不可用。
要取消优先级跟踪,请为目标命名或取消选择TW。
速度搜索(VS)
速度搜索用于攻击闭合率大于自身飞机(ship)地面速度的目标,因此优先用于攻击前方目标。通常,VS用于检测远程目标。VS提供目标检测,作为目标速度相对于自身飞机速度(多普勒频移)的函数,并提供关闭速度和方位的输出。目标数据以B范围速度方位角格式显示为“绘图”。情节将在一段时间内“淡化”并消失。淡化率通常由雷达自动控制,但飞行员可通过MHDD上的软键选择来改变淡化率。自动绘图淡化时间将等于扫描体积时间的2.5倍,可以为每个检测到的对象显示2或3个绘图。
由于缺少可用的范围信息,此模式下没有跟踪功能,尽管可以选择绘图进行锁定跟踪。如果在VS绘图上实现锁定跟随,则显示将更改为默认范围格式。
可通过在MHDD/ATCK格式上从任何其他主模式中选择VS直接进入VS模式。VS demand之前的任何现有锁都会被打破,雷达会在搜索状态下启动VS操作。
自动/自动锁定跟随模式(LF)
概述
三种锁定跟随模式针对其特定任务进行了优化,如下所示:
–单目标航迹(STT)
–视觉识别(VISident);如果未选择武器
–机炮;如果选择机炮作为武器类型

在锁定跟随模式下,雷达锁定到单个绘图、航迹或目标。此模式提供高精度的位置数据。如果选择枪时实现锁定,则当目标在枪模式最大/最小范围内时,雷达进入枪锁定跟随模式(参见图1.243)。同样,如果选择VISident时实现锁定,则当目标在VISident模式最大范围内时,雷达进入VISident lock Follow模式(参见图1.244)。如果未选择GUN或VISident,则输入单目标轨迹(STT)。
单目标跟踪(STT)
STT是一种锁定跟随模式,可从任何搜索模式(驾驶杆顶部ACM控制)手动选择,或在选择空战模式后自动选择。对于手动STT启动,飞行员将XY标记定位在感兴趣的绘图、航迹、目标或显示位置上,并按下RACM/锁定按钮。如果实现锁定,则轨道符号由MHDDs和HUD上的对角叉支撑。该雷达功能也称为“外部采集”。

当雷达捕获机载目标并进入LF模式STT时,它会在距离、角度和距离速率上连续跟踪目标。未经授权的锁丢失后,将启动自动重新获取(图1.238)。如果重新采集失败,STT模式将终止,雷达将继续在实现锁定的主要模式下工作。
在锁定跟随模式下,无法并行搜索和跟踪其他目标。因此,如果从TWS模式进入锁定跟踪模式(通过空战模式-ACM除外),则现有TWS航迹将“进入内存”,因为雷达将只跟踪单个目标。如果雷达在锁定跟随模式下停留一段时间,记忆的航迹将自动删除。注意,当不再有指定目标时,DTL/PETL将被占用。
如果在空战模式(ACM)内尝试锁定,但未实现锁定,雷达将保持在选定的RACM中,直到取消选择。如果锁定成功,但随后丢失,雷达将尝试重新获取大约两秒钟,然后恢复到以前的搜索模式(或RACM模式,如果用于启动锁定),仰角和(如相关)方位角覆盖范围以航迹的最后一个已知角位置为中心。
当雷达处于STT时,ATCK格式上的扫描音量控制和仰角栏选项选择不可用,雷达音量将在EF上显示。范围刻度选项可用,但在STT期间,会启用自动范围刻度调整。
VISident模式(VIS)
注意
事项
不要依赖雷达获取的信息进行安全距离。
VISident是一种短程锁定跟随模式,为锁定目标提供雷达引导,以实现视觉识别,在不危及飞机的情况下,降低至最小雷达距离。
它仅在雷达处于STT时可用,但在TWS或STT时,可使用MHDD/ATCK格式上的VIS软键预先选择模式。软键上指示的预选允许设置所需的偏移量。
选择VISident后,HUD上会显示定位提示,提示上会显示最后选择的位置,通过单个选择即可接受此位置。如果之前未进行选择,则使用较小圆锥体上的默认位置6点钟。
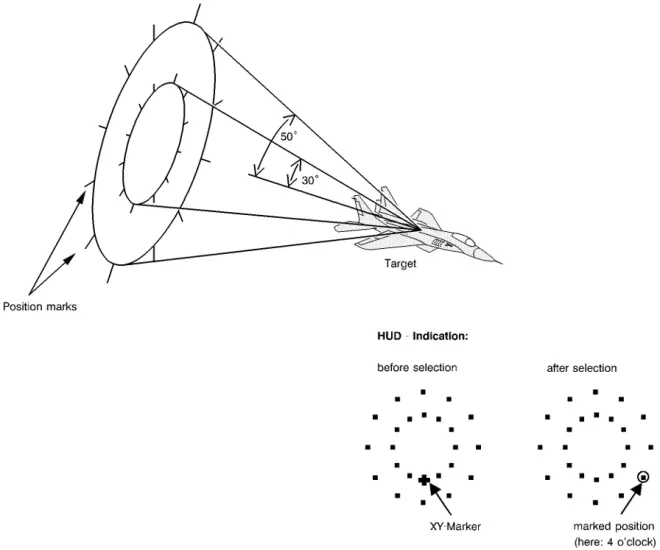
可以在目标周围的两个固定直径圆锥体中的一个上定义12个位置中的一个。圆锥体与设计眼位置有30°和50°半角。通过选择VISident软键定义所需的偏移位置。HUD显示两个同心圆和X-Y光标。光标可通过X-Y输入围绕圆锥体旋转,短插入可将光标从一个圆锥体切换到另一个圆锥体;然后,通过进行长插入,将所需位置固定在系统中。该位置可以从TWS或STT中预选,或在VISident模式下随时更新。新位置指示5秒钟,然后从HUD中发出定位提示(参见图1.245)。
注意
事项
VISident是“抬头”视觉模式,因此锥体仅显示在HUD中。

如果预先选择了VISident,并且在VISident范围外锁定,则将提供铅碰撞或纯追踪转向,直到达到最大VISident范围(见图1.246)。在最大VISident范围内,将进入VISident模式,转向将滞后于所选VISident位置(参考图1.244)。
如果雷达未锁定,在VISident预选的情况下,VISident圆圈和相关的距离率提示被占用,转向点提供纯追踪转向,HUD上仅显示目标距离、距离率和TD框。
如果实现锁定,将显示VISident target(访客目标)信息,包括:
–关闭/打开速度(数字和模拟)
–距离目标(数字和模拟),
–海拔高度,
–航线(track),
–最小可视范围,
–最小雷达锁定范围和空速,
–最小量程交叉,
–纵横角。
当目标距离小于2 NM时,显示目标距离倒计时,并显示额外的关闭速度读数。范围倒计时将指示200米的最小可视范围。在雷达锁定丢失之前,将在此范围下提供VISident符号。
目标的纵横角显示在HUD上,带有航迹视线指示。
抬头显示器(HUD)会自动分离(一般导航信息会被占用)。
如果在VISident选择之前选择了武器,则会自动取消选择该武器。
访问被取消:
–取消选择VIS软键
–断开锁定(预选仍处于活动状态)
–武器选择(同时取消预选)
–选择另一种雷达模式(如果是TWS,则VISident预选将保持选中状态,如果是SBY、RBGM、VS或ACM,则取消VISident预选)
–备用
所有指示将保留在抬头显示器上,直到雷达锁定中断。
机炮模式(机炮)
当选择机炮作为武器时,通过选择锁定,或当雷达处于锁定跟随模式时,通过选择机炮来切换到机炮模式。选择后,在最大机炮模式范围内,该模式与STT模式相同,并提供数据以支持机炮转向和瞄准信息。

在(分类)范围内时,将显示director gunsight(指挥员瞄准镜),并隐藏转向点(参见图1.243)。
当目标位于大于(分类)距离且雷达锁定时,雷达取消选择机炮模式并进入STT。转向点提供战斗机/目标碰撞转向;指挥员瞄准镜被遮挡,但历史追踪线显示在HUD上。当目标刚好位于边界处时,应用滞后以避免在这两种状态之间切换。要取消机炮模式,请断开锁定或取消选择枪。
空战模式(ACM)概述
雷达空战模式设计用于短程空战机动,需要快速自动雷达捕获和锁定视觉检测目标。这种模式的雷达功能称为“自动采集”。
以下雷达空战模式可用:
–从属采集(SACQ),
–垂直采集(VACQ),
–HUD采集(HUDACQ)。
雷达空战模式(RACM)通过HOTAS ACM按钮选择。选中后,雷达将尝试锁定搜索范围内的第一次检测。显示的扫描体积由攻击、仰角和PA格式占用。如果未实现锁定,雷达将继续在选定的ACM模式下搜索,寻找目标。
如果实现锁定,然后丢失,雷达将在选定的ACM模式下继续搜索之前,在最近已知的目标位置附近继续搜索一小段时间。
如果雷达锁定到不需要的目标,则重新选择ACM将打破对该目标的锁定(通气采集[bump acquisition]),并拒绝该目标约两秒钟,同时雷达在ACM采集中搜索更多目标。如果SACQ模式是ACM模式,则系统重新启动所选ACM,从拒绝的目标位置或SACQ模式的瞄准位置重新开始扫描模式。如果在此期间无法锁定不同的目标,雷达将重新进入ACM采集状态(见图1.238)。
锁定完成后,如果选择该武器,雷达将进入STT或火炮。如果尚未选择武器,系统将自动选择SRAAM(如果可用)。
雷达ACM模式可通过选择任何其他主模式直接进入。在ACM模式之前存在的任何锁都会被打破。当航迹文件不再有效时,雷达航迹将进入内存并删除,并且图将被占用。ACM选择优先于攻击和仰角格式上的所有其他显示和雷达选择。选择ACM的搜索模式将保留在软键上(RBGM除外,在这种情况下,最后选择的A/A搜索模式将显示在软键上)。
ACM模式可通过选择其他雷达模式来终止。选择断开锁定功能将使雷达返回到上次选择的A/A搜索模式(如果以前的模式是RBGM)。
从属采集(SACQ)
SACQ是一种窄采集模式,通过向前推动操纵杆上的雷达ACM选择按钮来选择。

当选择SACQ模式时,雷达天线最初与飞机视轴对齐,即围绕指令扫描中心将扫描体积调整为3.1°×3.1°,HUD上以飞机视轴为中心的直径为3°的参考圆表示(参考图1.242)。然后,雷达扫描中心可以与XY控制器配合使用,也可以与AIM-9L导引头配合使用(SRAAM传感器配合使用)。当雷达SACQ模式接通时,注释“HUD”显示在AF上的标记定位位置(MKR LOC软键旁边)。当选择SRAAM传感器从属时,参考圆将出现在HUD上的导引头位置,即雷达正在查看的位置。
如果选择了通气采集,即重新选择SACQ,例如,因为雷达已锁定到不需要的目标,雷达天线将再次与飞机瞄准轴对齐。
上限选通电路设置为15 NM。
垂直采集(VACQ)
按下操纵杆上的雷达ACM选择按钮aft可选择VACQ模式。

雷达的仰角扫描模式为2巴,仰角至少为-15度至+60度(见图1.241)。方位扫描覆盖范围将围绕视轴至少为6.2度。上限选通电路设置为15 NM。VACQ独立于武器,优先于武器初始化参数。
当以高AoA和高滚转率飞行以搜索即将到来的飞行路径时,最好使用此模式。
HUD采集(HUDACQ)
按下操纵杆上雷达ACM选择按钮的右侧,即可选择HUDACQ模式。

选择时,将扫描体积(8巴仰角)调整为HUD视野,该视野的方位角为30度(+/-15°右/左),仰角为25度(+7,5°上,-17,5°下)(参考图1.240)。上限选通电路设置为15 NM。
其他修改
手动Raid模式
雷达内提供Raid评估设施,雷达处理检测到的雷达返回,以确定检测范围内是否存在多个飞机或物体。Raid通过优化PRFs和其他特殊雷达技术来优化目标分辨率,从而改进距离计算。选择Raid时,75%的雷达扫描处理时间用于正常雷达处理,25%用于Raid处理。
通过在磁道、目标或空白区域(卷)上进行长XY插入,可以随时手动选择RAID。该设施仅在雷达处于TWS或锁定跟随模式时在AF上可用。
手动Raid期间检测到的任何绘图都会显示相应的2位数高度,与XY插入后的正常轨迹一样。RAID或区域框内的轨迹可以指定为目标用武器瞄准他们。因此,启用攻击所需的信息将与RAID图片一起显示。这将是DTL、剩余武器、自主时间、释放时间和射击提示。
RAID或区域框内的磁道也可以使用BIN和UNDO XY功能取消指定。
显示RAID图片时,无法选择手动航迹起始、更改选定的条数、调整雷达扫描宽度或方位中心或更改攻击格式范围。与这些功能的控制相关的符号被隐藏。
选择RAID时,缩放功能也不可用。
基本攻击格式范围和RAID图片中心的位置与RAID图片一起显示。
轨迹上的Raid
通过将XY光标定位在攻击格式上的轨迹符号上并进行长时间(大于1秒)的XY插入来执行轨迹上的手动Raid。AF更改为显示Raid盒,一个以选定磁道为中心的5 x 5 NM方形扩展显示器;显示屏类似于TGS扩展框,并通过显示屏右上角的图例“RAID磁道5”进行区分。“5”表示raid图片的大小(5 x 5 NM)。与TGS expand一样,一个小正方形显示了扩展框在基础射程标度上的位置,以帮助保持态势感知。raid处理产生的返回显示为绘图-它们的老化方式与正常格式的绘图相同;还将显示扩展框覆盖范围内的所有曲目。通过在Raid评估框内的任意位置插入XY(前提是XY标记未捕获任何符号)或选择任何其他格式,可以取消Raid显示。此外,raid进程在航迹内检测到的飞机或物体的数量(如果大于一个)在PA和高度格式的航迹符号左下方的一个小方框中显示为一个数字(最多两位数,前导零位)。
区域的Raid
卷上的手动RAID功能仅在TWS中可用。
通过将XY光标定位在感兴趣区域中心的AF上并进行长XY插入,可以对区域进行手动Raid。AF更改为显示5 x 5 NM方形raid盒,但现在飞机稳定。显示器右上角的图例“Raid WINDOW 5”将其与轨道稳定Raid盒和TGS扩展盒区分开来。因为它是飞机稳定的,即它在飞机前方“扫瞄”(snowplows)一个恒定的范围和方位,所以方框覆盖范围内的任何移动返回(再次显示为绘图和/或轨迹)都将在显示屏上移动。如果raid图与雷达航迹关联,则航迹内的对象数量也会显示在PA和高度格式上。
雷达陷波选择
雷达无法检测地杂波中的航迹,除非它们在自身方向上的速度分量足够大。该死区(雷达凹口)是一个物理雷达限制。
可以检测到刚好在死区外移动的轨迹。
由于道路交通(road traffic falls)属于该区域,因此有可能产生大量轨道。这将导致不可接受的显示杂波,因此当俯视武器系统时,人为地扩展此死区(雷达凹口)。雷达仍然可以检测这个扩展凹口内的回波,但不会试图在该区域内形成新的航迹或输出关于新回波的信息。如果现有轨道在此区域内移动,将对其进行更新和维护。
为了允许雷达在俯视时检测低速航迹,即直升机,可在AF上使用SK NTCH将雷达陷波选择为低(减小陷波大小,增加杂波)。
还可以通过将AF上的SK NTCH选择为AUTO来自动控制陷波操作。然后,向下看时,它将使用较大的凹口(以减少地面杂波),向上看时使用较小的凹口。
当雷达处于OFF、SBY、PBIT、VS、LF或任何A/S模式时,NTCH SK不可用。
起飞或着陆后的雷达模式转换
在地面,雷达在接通电源并预热后自动进入SBY模式。在T/O、WOW上,如果没有预先选择其他雷达模式,例如VS,雷达将自动进入TWS模式。当LGS上的相关MK预选了雷达静音(RDR SLNT)时,机轮卸重后的雷达传输被禁止。
着陆时,雷达自动进入SBY模式。
雷达安全联锁装置
如果WOW,无论是左起落架还是右起落架,所有雷达发射都被抑制。地勤人员可通过WOW超控开关超越该抑制功能进行测试。
如果雷达液体冷却失败,所有雷达激活模式将自动断开。飞行员可以在冷却失败后5秒内超控过热保护,并强制雷达再次提供激活模式,直到雷达完全失效。通过左侧控制台上的雷达保护联锁超控开关选择超控功能,并通过WOWs禁用。可以使用超控开关再次取消选择过热超越状态。
雷达隐身模式
在隐身模式下,在MDEF上选择SLNT,雷达天线停在敌方雷达难以检测到的位置。除非发生“重大事件”(见下文)或选择了活动扫描图标(从PSC 2.0开始)(见下文),否则不会执行任何传输或接收。
有关详细说明,另请参阅传输器管理第1-592页。
活动扫描图标
要离开隐身模式,可通过使用XY控制器在AF上选择活动扫描图标(从PSC 2.0开始),命令雷达执行两次活动帧扫描。这会暂时中断雷达的抑制状态。然后,雷达搜索两个全扫描模式,在选择隐身之前选择模式和音量。
如果在选择隐身抑制之前,雷达处于OFF、SBY、PBIT、ACM、LF或RBGM位置,则无法进行双活动帧扫描。
重大事件
在“全静音”和“程序”模式下,可能需要快速覆盖特定系统的传输抑制,以应对紧急威胁或紧急情况。以下“重大事件”满足了这一需求:
–选择ACM-这将使雷达进入ACM,并允许IFF询问器正常工作。取消选择HOTAS上的ACM(即通过选择“断锁”)将使雷达和IFF询问器返回“隐形”。然而,通过选择另一种雷达模式(如TWS)取消选择将引发“长期重大事件”,从而雷达和询问器有效地永久离开“隐形”(直到作为“所有静默或“程序”模式的一部分重新选择)。在这种情况下,传输禁止更改为“空”状态,或从“程序”中删除雷达和询问器,如MDE控件所示。
–选择EMGY或Eject-将在紧急模式下激活收发器。取消选择EMGY将返回“隐形”。
–选择ID-如果选择了适当的模式,将激活识别中的收发器。之后,收发器将返回“隐形”。
雷达强制待命
当雷达检测到任何内部问题或来自武器系统的数据问题时,可以自行选择强制待命模式。飞行员将收到显示在AF底部ROL上方的文本“RDR STBY”的警报。
空对地模式
雷达将在以下空对地模式下工作:
实波束地面映射
该模式以攻击格式提供俯仰、滚转和漂移稳定雷达地图视频,并由RBGM键选择。当使用RBGM软键选择时,雷达将变为映射模式,攻击格式变为PPI格式(B-scope不可选择),航迹定向雷达地图将显示为雷达扫描。取消选择RBGM将选择最后一个A/A雷达搜索模式。
雷达仰角扫描是手动控制的,没有自动扫描仪指向。雷达将根据攻击格式范围,自动选择单栏和双栏仰角扫描;没有手动选择扫描条。在此模式下,AF上不会显示高程覆盖率和条数指示。
AF范围将保持不变,除非范围大于最大RBGM范围,在这种情况下,它将成为最大可用RBGM范围。
对于空对空操作,可以改变扫描的攻击格式范围、扫描宽度和仰角。
RBGM的增益控制(从PSC 2.0开始)
雷达的接收机阈值通过雷达增益功能控制。它要么由雷达自动控制,要么通过选择增益SK手动控制。AF上会出现一个手动增益控制选择图标。图标上的XY插入将使油门顶部的仰角轮模式从扫描仰角控制切换到增益控制,反之亦然。图标为反差(白色背景),以指示增益控制何时处于活动状态。增益设置在图标中显示为百分比(最大值=100,最小值=0),数字越大,增益越高。设置将在0和100处停止,即该值不会覆盖。选择时,将显示最后一个自动控制值。选择手动控制时,自动功能将被禁用。
RBGM衰减控制
使用XY控制器通过衰减图标控制雷达的发射机电平。衰减值以1到6的整数显示。最大功率输出的默认值等于6(0 dB),其中最小值等于1(15 dB)。插入图标的上部V形符号可降低衰减设置,即增加雷达功率。插入较低的V形符号可增加衰减设置,即降低雷达功率。图标为倒对比度(白色背景),以指示衰减控制何时处于活动状态。长插入以每秒两步的速度更改值。
雷达(1B-B-93-10-00-00A-111B-A第003版)

图1.248-雷达模式选择


2 X-Y标记,用于调整扫描宽度
图1.250-攻击格式PPI显示

图1.251-雷达扫描行调整

图1.252-RAID窗口


图1.254-攻击格式-实波束地面映射

图1.255-攻击格式-全静音模式

图1.256-HUD-从属采集

图1.257-HUD-雷达从属采集和SRAAM手动模式

图1.258-HUD-Visident位置选择

图1.259-HUD-Visident雷达锁定

图1.260-HUD-最大范围内的可视目标

图1.261-HUD采集

注:超出HUD视野
图1.262-HUD-垂直采集


图1.264-高度格式-纵断面显示



图1.267-攻击格式IFF指示



欢迎各位莅临本群讨论!

