
如何用蓝牙实现无线定位--双定位显示
1. 机器人定位装置的构建

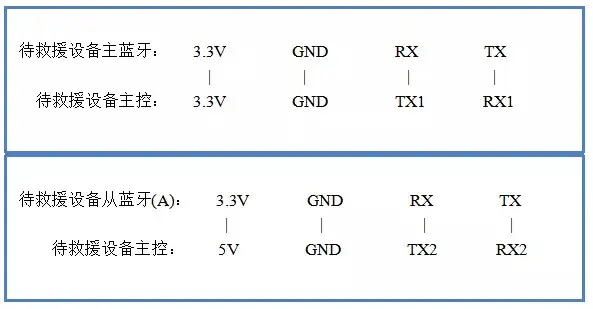
按照上面的针脚使用杜邦线将救援机器人定位装置的主从蓝牙连接到主控板上,注意错误的连接会导致模块损坏。
2. 机器人位置的获取与发送
(1) 在机器人定位装置的控制板中烧录以下程序(robot.ino)
(2)在中控台的主控板中烧录以下程序(master.ino)
(3)在待救援定位装置的控制板中烧录以下程序(human.ino)
(4)把定位装置安装在救援机器人身上

(5)依次开启信号塔、待救援定位装置、机器人定位装置、中控台的电源,中控台的OLED屏幕上即可同时显示待救援者和机器人的坐标值(注:中控台的电源必须最后打开)。
(6)控制救援机器人移动,可看到机器人的定位坐标随着它的移动而变化。

接下来就可以控制机器人向待救援目标前进了。如果再给救援机器人增加一套WiFi视频遥控的功能(请参考斜三角履带机械臂小车【https://www.robotway.com/h-col-155.html】),就可以构建出一套完整的机器人救援场景模型了。

3. 资料下载
资料内容:
①双目标显示-例程
②蓝牙配置说明.txt
资料下载地址 https://www.robotway.com/h-col-167.html
想了解更多机器人开源项目请关注机器谱网站https://www.robotway.com
