
Lucidvr gloves 5.0
元件清单
49E霍尔传感器 3个/每手指 10*15*4mm轴承 2个/每手指 3*2mm铷磁铁 10个/每手指 CD74HC4076 1个/每手 ESP32-WROOM-32(U) 1个/每手 MG90S舵机 1个/每手(如需力反馈) 5v电源 按键,摇杆,线材,热熔胶,XH2.54端子头,HX2.54 5p接插件等耗材,冷压端子钳一副
3D打印件
如图所示

其中
rigidmount*2

打印时另一只需做镜像处理,同时建议调整好精度与支撑,有些地方支撑很难拆,这个零件要求柔性,目前我已尝试可用的PLA,尼龙,黑色树脂。
FingerRack*10

可用PLA,尼龙材料打印 bearingRetainer *10

手部横向轴承的盖子,PLA即可 magnetpinion*10

建议PLA或尼龙 mountspacer *2

用于固定追踪器,PLA SensorHousing*10

不建议使用PLA,精度要求极高,大量需要支撑的地方,建议使用尼龙 SensorTop*10

使用PLA或尼龙均可,但需控制精度,建议与sensorhousing使用同一台打印机和相同收缩率的材料,以控制误差 ServoGear*10

舵机齿轮,PLA ServoRack*10

舵机齿条,需控制精度,可用PLA或尼龙 EndRings and GuideRings


指环,有多个大小,根据手指大小自选
电路图


霍尔传感器的焊接

先剥好线,用电烙铁给线附上锡,再贴住霍尔传感器引脚,不要用电烙铁长时间贴住霍尔传感器引脚,传感器不耐热
绕线方案

霍尔传感器的电源引脚和接地引脚并联,信号输出引脚各占一口单独输出
制作方法


控制好线的长度,如图绕线并接好端子 magnetpinion塞入4-5个铷磁铁,但不建议将轴承也放进去

由于精度问题,我将轴承先卡上sensorhousing的位置再安装magnetpinion,安装过程更顺畅。如下图

安装齿条


安装盖子

此处较紧,如精度没有问题,可以慢慢晃进入,不要太大力摁坏了

安装舵机 安装舵机齿轮

螺丝固定

rigidmount安装 每个手指处安装4-5个磁铁

扣上轴承

盖上retainer

完成样式


完成每个手指并接线,样例

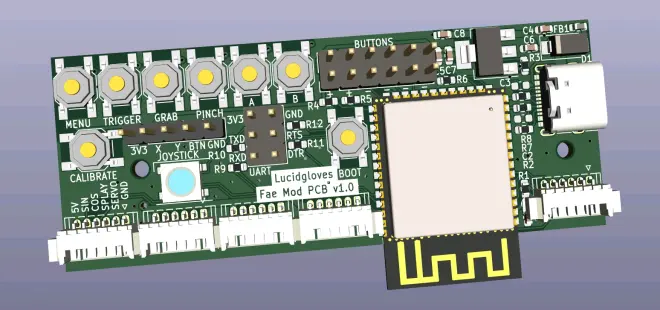
推荐的社区项目 PCB https://github.com/Aquapupper2112/V4-PCB 简化方案 https://github.com/codingcatgirl/lucidgloves-fae-mod




Lucidvr gloves 5.0 Beta https://github.com/LucidVR/lucidgloves/wiki/Prototype-5-BETA-Assembly-Guide
