
AN/APG-66机载火控雷达详解
前言:这是一个极度无聊无趣关于雷达数据的文章,但是可以通过文章提前预习J82PP的AN/APG-66-PRC-F8.
注:所有数据出自国内(外)开源文献,如有错误还请见谅
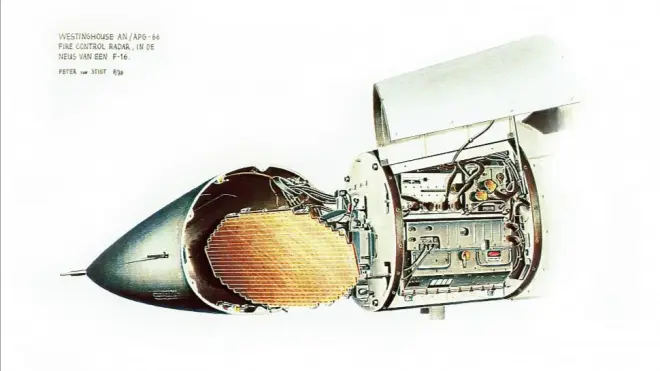
AN/APG-66火控雷达为F-16飞机机载火控系统的重要组成部分,是一部工作于X波段的多体制,多功能雷达。该雷达具有空空截击,复杂气象条件下的空地武器投放和导航等功能。可为飞机提供全天候的空空和空地作战能力,可在全高度(包括地面杂波影响严重的低高度)探测和跟踪空中目标。AN/APG-66雷达采用了先进的数字信号处理技术和成熟的作战飞行程序。它工作于MPRF,LPRF,在空空远距离搜索和空地功能的地形测绘,信标等工作状态中,采用脉冲体制:在杂波背景中探测及跟踪低飞目标时,采用脉冲多普勒体制。由于数字技术和成熟软件的采用,大大提高了雷达作战性能,可靠性和维修性,雷达不需要在外场进行调整以及使用专业的外场维护设备。
一,基本组成和物理参数
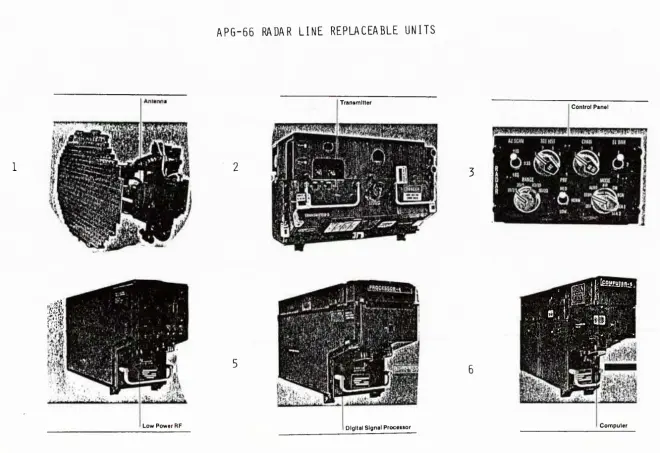
AN/APG-66雷达由7个外场可更换部件(LRU)组成,共用了9500多个元器件,有三相交流115V 400Hz和28V直流供电。各部件名称和基本情况如下:
(1)天线及伺服装置,为61cm x 71cm椭圆形开缝平面阵,重量32.2kg,交流耗电250VA:另外有安装在支座上的环形结构波导组件重4.53kg,直流耗电50W(用于驱动波导开关)。
(2)发射机。体积30x47x26.7cm³,重量31.3kg,交流耗电1430VA,直流耗电30W。
(3)低功率射频组件(LRU2) 。体积28.7x17.8x56.9cm³ ,重量23.9kg,交流耗电605VA,直流耗电110W。
(4)雷达计算机(RC)。体积28.7×10.16×62.2cm³,重量15.0kg,交流耗电355VA,直流耗电5W。
(5)雷达控制板(RCP)。体积14.6×8.57×16.5cm³,重量1.8kg,交流耗电6VA,直流耗电15W。
(6)数字式雷达信号处理机(DSP)。体积28.7×17.8×59.4cm³,重量28.8kg,交流耗电1070VA。
(7)设备安装架及内部连接电缆。体积0.0099m³,重量8.8kg。
整部雷达体积为0.11m³,重量146.33kg,总交流供电3.716kv,直流160W,总冷却供风量(27℃)307.542kg/h。
二,主要功能和战术技术性能
(一)空/空探测功能和基本性能 AN/APG-66(V1)
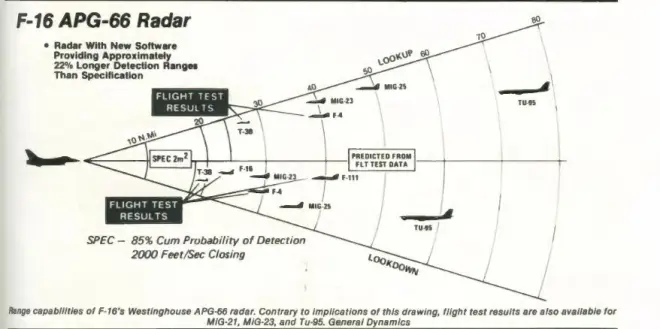
(1)上视搜索探测距离46~74km(35~40nmile),上视跟踪距离为37~46km(20~25nmile)。使用LPRF波形完成,对中空的目标探测距离提高了25%。
检测条件为:搜索空域为方位60°、俯仰10°;目标雷达截面积为5m²;85%累计探测概率;目标接近速度为615m/s。飞行员选定目标后,人工截获过程应在4s内完成。
(2)下视搜索探测距离37~56km(20~30nmile)。使用MPRF波形完成,可从地杂波背景中检测出目标。
检测条件为:地杂波后向散射系数y=0.15,搜索空域为方位60°,俯仰10°,目标雷达截面积为5m;85%累计探测概率;目标接近速度为615m/s。飞行员选定目标后,人工截获过程应在4s内完成。
(3)空战格斗时最大探测距离限制在18.52km(10nmile)内,大于此距离的目标不显示。对12.964km(7nmile)内目标,雷达的单次扫描检测概率为90%,应在2s内完成第一个探测到目标的自动截获过程。若在4s内未完成截获,雷达返回到截获前的空战搜索模式。
(4)虚警率小于1次/min。
(5)自动状态:根据载机的战术使用条件,雷达自动选择“上视”或“下视”工作方式。
(6)搜索空域。常规空战(NAM)方式时,天线扫描方位范围为±10°和±30°(扫描中心可选定在天线转动极限范围内任何位置),以及±60°;俯仰扫描行数可选1行、2行和4行,天线俯仰最大转角为±60°(具体搜索俯仰范围受油门杆上的天线俯仰电位计控制);距离量程选择范围分为18、36、72和144km 4挡。
空战格斗(ACM)方式近距大机动空战时,搜索图形分为4种:
①基本搜索,方位20°×俯仰20°,以飞机机体为参考坐标系,扫描中心为方位角AZ=0°,俯仰角EL=-1.5°;
②宽俯仰角搜索图形,方位10°×俯仰60°,以飞机机体为参考坐标系,扫描中心为AZ=0°,EL=+18.5°;
③可移动搜索,方位60°×俯仰20°,以惯性空间为参考坐标系,扫描中心初始位置为AZ=0°、EL=0°,可通过油门杆上的X-Y标线控制器移动搜索区;
④瞄准线,天线固定在AZ=0°、EL=+1°不动。
(7)通过选择脉冲重复频率,使得自150m起至目标最大探测距离内没有距离/多普勒盲区;空战搜索时的目标速度覆盖范围为-304.8~+1066.8m/s(-1000 ~ +3500ft/s),目标径向速度在±30.48m/s(±100ft/s)内时除外。
(8)目标跟踪时可连续提供探测目标的角度、速度和距离等数据。目标跟踪最小距离为152.4m(500ft),跟踪速度范围为-304.8~+975.36m/s(-1000 ~ +3200ft/s)。
①距离跟踪精度。在指定跟踪速度范围内的距离跟踪精度(1σ)为±15.24m(±50ft),或为1%跟踪距离两者中的较大者。
②距离变化率数据。雷达可测量目标沿视线方向的距离变化率,精度(1σ)为:当目标距离小于9.26km(5nmile)时为±15.24m/s(±50ft/s);当目标距离大于9.26km (5n mile)时另定。
(9)可适应先进中距空空导弹(AMRAAM)的制导发射。AN/APG-66(V)3型可采用连续波(CW)照射器,对AIM-7空空导弹进行制导。
(二)空/地功能和基本性能
(1)空/地测距(AGR)可为火控计算机提供目标沿天线视轴的斜距和接近速度。几乎所有的对地武器投放(如俯冲拉起轰炸、航炮对地射击或发射火箭弹、CCRP等)都使用此状态。在擦地角为5°~60°的范围内,雷达测斜距范围为152.40m~18.52km(10n mile)。测距精度如表所示。

透过天线罩测斜距时,天线视轴将指向一个2.3mrad(1σ)的固定仰角。上述精度包含有天线罩视轴漂移误差。
(2)真实波束地图测绘(GM或RBM),利用LPRF波形和天线真实波束完成,可向飞行员显示飞机前方或地面地形图,用于导航、搜索和攻击地面目标,标定、直接或间接轰炸。方位扫描范围可选择±10°、±30°或±60°,PPI显示;天线俯仰覆盖为1行;距离量程可选择10、20、40或80nmile。在10nmile挡时的显示距离分辨率不低于76.2±18.3m (250 ±60ft)。
(3)扩展地图测绘,能在多功能显示器(MFD)上按4:1放大显示被跟踪点附近的地形图。显示放大区域如表所示。

(4)多普勒波束锐化(DBS)为PPI显示形式。当目标的实际距离在22.5nmile内时,雷达转到此状态工作。多普勒波束锐化提高了方位角的分辨能力。
(5)地图冻结(FRZ)为隐蔽攻击行动时采用的导航方法。此时的雷达地形图固定在指定点上,发射机停止工作,随着飞机的运动,飞机符号在雷达地图上移动来进行地图导航。经过一段时间后,雷达重新开机工作,产生新的雷达地图后再关机导航,重复多次后,直到到达预定点为止。
(6)信标状态,用于导航和间接投放武器。
(7)海1,能在4级以下的海面状况下搜索截获海面上的活动或静止舰船自标。
(8)海2,能在更恶劣的海面状态下探测目标。使用了更窄的多普勒滤波器凹口,具有动目标指示(MTI)能力;MTI功能也可探测地面上的活动目标。
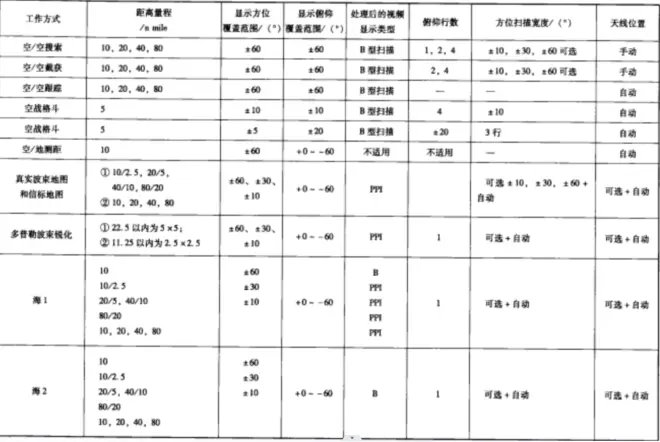
APG-66雷达在空/空、空/地方式工作时的显示模式数据见表。
(三)电子反干扰能力
具有频率捷变的电子反干扰能力,有4点相参跳频和10点非相参跳频两种抗干扰工作方式。
(四)可靠性和维修性
原型雷达的平均故障间隔时间(MTBF)设计要求为100h,实际达到90h;后期改进改型后达到140h(经验证)或210h以上。具有完善的机内自检测(BIT)系统,可在雷达正常工作时连续监视大约300个系统参数。隔离到外场可更换组件的故障自检测率达到95%,BIT虚警不超过指定故障数的1%。外场可更换部件(LRU)的外场更换时间(MTTR)为5min。
(五)AN/APG-66改进型的新增功能
随着新的武器和作战需求的牵引,同时也为了体现20世纪80年代电子技术水平的显著提高,在美国空军的要求和支持下,西屋电子公司先后对AN/APG-66 作了许多改进,包括提高探测距离等性能、增加新功能和采用新技术、新型元器件等。其改进型先后有:APG-66(V)1型、APG-66(V)2型、APG-66(V)SASS型等。
在战术使用上增加的新功能有:
(1)为满足先进中距空空导弹(AMRAAM)的制导和多目标攻击要求,提高了雷达作用距离,增加了边扫描边跟踪(TWS)功能,可同时跟踪10个目标,并向火控计算机传送目标位置和状态参数;在多目标跟踪时,还有4个目标的战情提示功能。
(2)增加了入侵判断(RAM)工作方式,以判断是单一目标还是群目标,满足对入侵目标规模的了解。
(3)可以对半主动雷达制导空空导弹实施HPRF波形的制导照射,无须加装连续波照射器。
(4)空空下视探测时能有效地抑制地面动目标引起的虚警,如高速公路上快速运动的车辆和海面上的快艇等目标。
(5)进一步提高了对地时具有高分辩率的多普勒波束锐化能力,锐化比从原来的8:1提高到64:1,作用距离达148km(80nmile),以满足精确导航、定位和空地武器投放的要求。
(6)对地面慢速小目标的动目标指示(GMTI),对地面、海面和沙漠上的固定目标或动目标跟踪,对地图测绘中的空地导弹提供战情提示。
(7)增加了地形跟随和地物回避工作方式,以满足低空突防作战时的飞行安全要求。
为了实现上述新增功能,同时又满足载机的装机技术要求,要求雷达的体积、重量、结构形式和安装技术条件基本上与原型雷达相同。因此,在改进型设计时尽量采用了各项新技术。主要有:
(1)采用可编程信号处理机(PSP)代替原型的固定程序信号处理机和雷达计算机两个外场可更换组件。PSP的采用使得雷达系统在不增加硬件的条件下,可通过软件更新重新调整系统性能和增加系统功能,如前述边扫描边跟踪、地形跟随和地物回避、高分辨率地图测绘等许多战术功能的增加,都是PSP软件重编程序能力的体现。
(2)采用新型栅控行波管功率放大器,在原型雷达只有MPRF、LPRF信号波形的基础上,增加了HPRF波形的工作方式。它既能为MPRF、LPRF信号提供较高的峰值功率,又能为HPRF波形提供50%的大占空比,使得雷达可以实现HPRF、MPRF、LPRF交替使用的高性能全向(指目标进人方向)目标探测。使用HPRF工作方式探测迎头目标时,其探测距离可增大40%。
三、AN/APG-66雷达的主要部件
AN/APG-66雷达主要由6个外场可更换部件组成,它们之间的接口大部分通过数字式多路总线相互连接,只有数字信号处理机和雷达计算机之间用独立的高速数据总线连接。
(一)天线(LRU1)
AN/APG-66的天线为61cm×71cm的椭圆形平板缝阵天线,安装二轴方向环架上。它在全部扫描角度内都有较高的增益,其突出特点是天线旁瓣低,可靠性高,易于维护。
天线的功能和性能指标要求为:
①扫描覆盖:方位和俯仰±60°;
②往返时间:200ms;
③电驱动;
④频率覆盖:信标状态9.31~9.375GHz
雷达状态9.70~9.90GHz
导弹照射10.10~10.16GHz
⑤尺寸大小:标定28.156in×18.9in(715.1624mm×480.06mm)宽的平板;
⑥笔状波束;
⑦承受功率:占空比1.5%时20kW峰值功率,同时附加250W导弹照射连续波功率;
⑧标定增益:雷达中心频段32.3dB;
⑨峰值副瓣:方位—在主波束之下31dB,俯仰—在主波束之下26dB;
⑩电压驻波比(VSWR):9.7~9.9GHz时小于1.8:1 ,9.31~9.375GHz时小于5:1;
⑪利用软件控制的单相跟踪机械顺序扫描(典型运动如上、下、左、右),扫描速率与每种工作方式的积累时间同步;
⑫定位回路带宽:最小8Hz(方位和俯仰);
⑬无速率陀螺或自整角机,通过Digibus总线将定位误差(来自方位和俯仰解析传感器)送至计算机;
⑭当天线指向角为55°时,载机机动横滚速率250(°)/s、横滚加速度250(°)/s²。
(二)低功率射频组件(LRU2)
它包括接收保护器、低噪声参量放大器、接收机、ADC、稳定的本地振荡器,以及系统的时钟振荡器。其主要功能是产生低功率的雷达射频信号及系统时钟,完成雷达回波的模拟接收处理。
低功率射频组件的功能和性能指标要求为:
①LPRF内部接口分配(包括Digibus)和一定的由微处理器控制的自校正功能;
②接收机保护装置;
③前端STC、CAGC、TAGC的RF衰减器(最大衰减60dB);
④RF带宽选择,通一断至少60dB;
⑤STC功能发生器。通过计算机可选择K/R⁴、K/R³、K/R²之一;
⑥出自16个可能频道的4个可选相参载波频率,以及慢切换(ms)非相参捷变频率;
⑦频率捷变:非相参模式时为脉间变频,共10个频率点,每个相隔5MHz,在相参模式时为4个频率点,每个相隔53.3MHz;
⑧固定序列的捷变频率编程控制;
⑨稳定的本地振荡器(STALO)噪声要求;
⑩LPRF单元引入噪声系数:标称4.0dB;
⑪低噪声放大器(LNA)开启时,标定噪声系数为3.3dB;
⑫低噪声放大器,同步开—关转换时的增益为25dB时,标定噪声系数4.2dB,同步开一关转换时的增益为19dB时,标定噪声系数1.8dB;
⑬信标方式:中频带宽30~40MHz,带门限的视频检测器混合AD(I通道)信号输出;
⑭中频接收机噪声系数(标定值),雷达方式时为12dB,信标方式时为17.5dB;
⑮中频增益要求;
⑯通过计算机进行杂波定位(预测)(Δf VCX0≈43 kHz)和杂波跟踪;
⑰噪声AGC,由计算机控制RF衰减器(最大衰减40dB)和中频衰减器(最大衰减25dB),信标方式除外;
⑱同步选择脉冲匹配滤波器;
⑲A/D为11bit采样率1MHz,10bit采样率1.75MHz,6bit采样率3.5MHz(最大);
⑳A/D 时钟56MHz;
㉑A/D输入噪声电平设置:空/空模式时为1.4(RMS),空/地模式时为1(RMS);
㉒残留要求:相邻门里最大为-30dB,其余门里最大-80dB。
(三)发射机(LRU3)
雷达发射机包括气冷式行波管,由固态器件组成的栅控脉冲产生器、高压电源、校准器,以及行波管保护和控制电路。它放大发射由飞行员根据需要在雷达控制面板上选定的4个频率之一供天线使用。该发射机的特点是小而轻,可靠性及维修性都较好。
发射机的功能和性能指标要求为:
①送至天线法兰盘处的峰值功率为15kW,连续的平均功率为188W(30s内的最大平均功率可达250W,均为f0处的标称值);
②最大占空比:连续工作时为1.25%,限时工作时为1.50%;
③PRF 宽度:100~23000Hz;
④脉冲宽度:0.286~8μs(脉冲发生器为0.57~8μs,稳定本地振荡器选通脉冲0.286μs);
⑤RF增益60dB;
⑥频率:9.375GHz,9.7~9.9GHz;
⑦输人激励电平:+13dBm;
⑧无等效负载;
⑨3min开机要求;
⑩噪声要求。
(四)数字信号处理机(LRU4)
主要用于处理来自低功率射频组件的雷达信号,进行杂波消除处理和雷达输出视频处理。使用标准的集成电路完成电路设计。在用大规模集成电路代替标准集成电路后,可进一步减小信号处理机的体积和重量,成本也将随之下降。
在雷达各工作方式中,数字信号处理机的功能和性能指标要求如下:
(1)中重复频率下视方式
①搜索和常规跟踪工作时采用11bit、IMHz字速率,在短距离跟踪时采用10bit、1.75MHz字速率;
②杂波电平测量(CAGC);
③预先对消器,2延迟脉冲前向反馈;
④削波限幅器,8bit输出;
⑤FFT,64个滤波器,128个门,60dB Dolf Chebyshev 加权;
⑥后处理
●反向增益加权降至滤波器,输出噪声电平为1.57量级。
●CFAR处理,搜索时为3门×9个滤波器,或者5门x7个滤波器,去除其中的1门×3个滤波器区域;跟踪时,DSP向雷达计算机输送4门×8个滤波器。
●后处理时间灵敏度控制(STC),距离可变门限起点为7nmile。
●距离相关,1024门:距离门≤511时为N/8;距离门≥512时为(N+1)/8。
(2)低重复频率上视方式
①在80n mile 挡时,采用11bit、125kHz字速率,在40、20、10nmile距离挡时,采用11bit、250kHz字速率;
②FFT,64个滤波器,128门,120dB Dolf Chebyshev加权;
③以DC为中心置空5个FFT滤波器;
④后处理,CFAR处理同下视方式;
⑤64个脉冲积累,3个瞬时消隐脉冲。
(3)空战格斗方式
①A/D字速率:搜索时为11bit、IMHz字速率,跟踪时为11bit、1MHz字速率或9bit、1.75MHz字速率;
②除前端STC和5nmile显示限制外,其余同下视方式;
③自动截获最近目标。
(4)真实波束地图
①PRF:在80nmile挡时为571Hz,在其他距离挡时为598Hz;
②6bit、3.5MHz A/D字速率(最大);
③线性检测器;
④32个脉冲的后检测积累(PDI常数为0.8),积累器每隔4个IPP被采样;
⑤对数压缩器————4bit输出;
⑥不加门限的视频输出;
⑦扫描变换器————标准格式的PPI实现形式,基础分辨率为241个距离比特×241个方位比特×4个明暗强度比特。
(5)多普勒波束锐化
①6bit、3.5MHz A/D字速率;
②地图参考基准产生器;
③递归滤波器(最小带宽8Hz);
④线性检测器;
⑤若距离×sinΨ大于非扩展距离比例的一半,则采用多视向,即4个方位视向;
⑥对数压缩器-4bit幅度输出。
(6)信标方式
①6bit、3.5MHz字速率(最大);
②门限视频检测器输出混合正常A/D的I通道输出送至DSP,处理算法同真实波束地图;
③PDI—脉冲积累,并随代码可变,反馈常数=0.78;
④无译码逻辑,PPI地图实现形式。
(7)海1模式
①6bit、3.5MHz字速率(最大);
②脉冲宽度选择,根据距离挡位大小选择8~0.5μs,PRF选择,根据距离挡位大小和脉冲宽度选择470~1988Hz;
③线性检测器;
④PDI——32/96个脉冲积累,反馈常数为0.95;
⑤无门限视频信号显示,在10nmile距离内采用B型扫描,在其他距离量程和扩展模式中为PPI显示。
(8)海2模式
(9)空/地测距
①6bit数据,象限I和Ⅱ为2MHz A/D字速率,象限Ⅲ和I为3.5MHzA/D字速率;
②线性检测器;
③PDI—7个脉冲积累,反馈常数为1.0;
④块(clump)检测。
(五)雷达计算机(LRU5)
它是一部小型的可编程处理机,也称雷达数据处理机。用于空/空、空/地工作时的目标跟踪、地形测绘、惯导坐标修正等处理,在雷达的各种工作状态中进行必要的计算,并把数据送往中央火控计算机(FCC);负责雷达与其他火控分系统的接口交联;还控制雷达系统的自检测功能;具有与AIM-9“响尾蛇”导弹以及后来增加的AIM-7“麻雀”导弹的目标位标器控制能力。
该处理机原有一个32K×16位的存储器和4K随机存储RAM,后来扩展至40K。最先使用西屋公司1976年研制的作战飞行程序(OFP),汇编语言编程,占用33K存储容量。
在雷达各工作方式中,雷达计算机完成的工作如下。
①扫描图形产生器;
②地图参考坐标产生器控制;
③空域稳定;
④AGR计算,前端电平控制;
⑤AGC回路滤波(卡尔曼滤波技术);
⑥角度回路滤波(卡尔曼滤波技术);
⑦距离跟踪(卡尔曼滤波技术);
⑧自动截获逻辑;
⑨杂波定位;
⑩显示控制;
⑪相关器控制;
⑫园门限控制;
⑬BIT;
⑭稳定失效(INU)备份计算;
⑮FCC状态监控;
⑯AIM-9导弹接口。
(六)雷达控制板(LRU6)
由于F-16是单座战斗机,为了减轻飞行员的工作负担,APG-66雷达的操作自动化程度较高,飞行员进行手动操作较为简单。在飞机座舱左侧操纵台上有一小型雷达控制板,其上有9种主要开关,分别是:方位扫描、目标历程、冻结、频道、指示器亮度、俯仰行数、距离量程、脉冲重复频率选择、状态选择等开关。目标历程(Target history)开关用来控制显示在雷达显示器(多功能显示器)上所有目标数据的数目。分为1、2、3、4个位置,选择位置1只显示天线一次扫描的目标信息,选择2、3、4时则依次附加过去几次扫描所获得的目标信息。为完成雷达控制,在油门杆和驾驶杆上还有雷达游标、天线俯仰角、格斗和目标指示等开关。
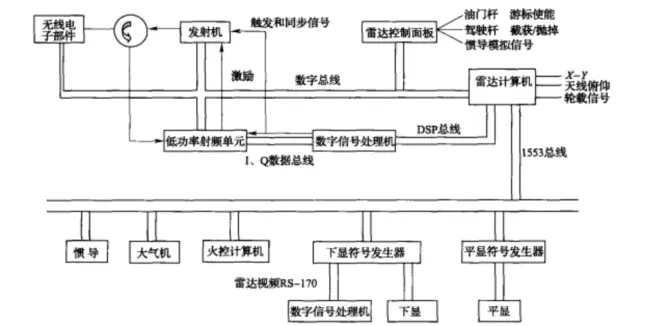
四、交联关系
AN/APG-66雷达系统接口控制和交联关系如图所示。
五、雷达各工作方式实现的技术途径
(一)空/空方式
AN/APG-66火控雷达在上视、下视和自动选择工作时,分别对应有雷达控制面板上的“LOW”、“MED”、“NORM”3种PRF工作方式。
空域扫描范围为方位(AZ)、俯仰(EL)±60°,方位——俯仰转弯角=±30。方位宽角扫描时为±60°;中等宽度和窄扫描时为在天线框架止动位置范围内的±30°和±10°,方位中心位置围绕截获符号确定。俯仰扫描为在天线框架止动位置范围内的1、2、4行(在中等宽度和窄方位扫描、俯仰扫描中,如遇到天线框架止动位置限制,均自动裁减掉此受限扫描范围)。距离量程为10、20、40、80nmile。
飞行中可手动或自动选择4个射频通道。
目标历程可由操作者选择显示当前帧或目标历史的前3帧数据。
(1)低重复频率工作方式
①80n mile 量程挡时,搜索重复频率为1000Hz,不模糊距离为149.88236km(80.93nmile);用于40/20/10nmile量程挡工作时,搜索重复频率为2000Hz。
②前端时间灵敏度控制(STC),12nmile 内∝R^-4。
③相参处理。
④80n mile量程挡时,采用1/1探测判据;40/20/10nmile量程挡时,采用1/2探测判据。
⑤CFAR。
⑥模糊距离跟踪(同下视工作方式)。
(2)中重复频率工作方式
①中等重复频率平均为11.1kHz,搜索时8个重复频率为一组。
②从10n mile 开始,检测后处理距离变化STC∝R^-4。
③当距离<41.44mile(距离门号0~511)时,采用3/8探测判据。
④当距离>41.44mile(距离门号512~1023)时,采用4/8探测判据。
⑤采用FFT滤波器去杂波作为杂波预消器。
⑥CFAR。
⑦通过57.5n mile/h(106.49km/h)的固定凹口宽度进行地面动目标抑制,抑制大于30dB。
(3)常规重复频率工作方式
自动选择低重复频率或中重复频率工作,具体由仰角决定(水平线以上角度<6°时采用中重复频率)。
(二)ACM方式
(1)可通过油门杆上的格斗导弹优选开关进行选择。
(2) 距离范围:500ft~5nmile(152.4m~9.26km)。
(3)相参处理,低重复频率方式,与下视方式的重复频率相同。
(4)前端STC(8.3n mile)∝R^-4。
(5)用油门杆手柄上的“返回搜索”按钮选择视场扫描模式:
方位20°×俯仰20°(俯仰4行),俯仰中心为飞机水平线以下-6°;
方位10°×俯仰40°(3行方位扫描,在垂直扫描位置的中心),俯仰中心为飞机水平线以上+13°,此值对于全部俯仰扫描空间来说为可编程常数。
(6)自动截获出现在天线射频波束图形内的最近距离目标。
(7)截获时间小于2s。若在探测到目标1s内未进人跟踪,雷达恢复到之前时刻的空战格斗搜索方式。
(8)距离刻度为海里。
(9)天线稳定在机体坐标系。
(三)跟踪方式
(1)有短脉冲和常规脉冲两种子模式,由跟踪目标距离功能自动选择。
短脉冲跟踪时,0.57μs脉宽,最大重复频率23kHz。当截获距离等于或小于1904ft(580.34m)自动选择此方式;到2416ft(736.40m)时转为常规跟踪方式。
常规脉冲跟踪时,1μs脉宽,最大重复频率15kHz。当截获距离大于2416ft(736.40m)时自动选择此方式。
(2)上视模式跟踪与下视模式跟踪等同,即只有一种跟踪模式。
(3)与目标多普勒频率跟踪功能一起,同时完成跟踪重复频率的连续计算。
(4)软件中采用每两次扫描的检测后积累。
(5)跟踪距离范围为500ft~80nmile(152.4m~148.16km)。
(6)跟踪惯性时间为4s。在此之后,在跟踪丢失位置重新进行再次截获过程。若未建立起再次跟踪,则返回搜索过程。在空战格斗模式中,经历4s的惯性跟踪时间和再次截获未果后,雷达返回到格斗搜索方式。
(四)真实波束地图
(1)中心在方位游标位置作±10°或±60°方位扫描,俯仰1行。
(2)工作方式手动选择,当控制设为“AUTO”时由FCC选定。
(3)方位和俯仰均为笔形波束。
(4)前端STC;STC距离为距离量程的函数,并且∝R^-4。
(5)对于10、20、40或80nmile量程采用256个距离门。
(6)X-Y游标可由FCC或飞行员定位。
(7)对于每个量程在游标位置进人后可获得4:1的扩展。
(8)用油门杆手柄上的“返回搜索”按钮选择扩展工作模式。
(9)在扩展模式中游标固定在显示中心。
(10)游标移动控制光标下的地图移动。
(11)手动中频增益控制。
(12)PPI显示格式。
(13)由天线扫描完成画面显示偏航稳定,参照飞机方位0°对地攻击进行。
(14)视频对数压缩(4bit幅度)。
(15)显示240个门(纵横比1:1),冻结模式可选。
(16)脉间频率捷变,带宽45MHz。
(17)横滚、俯仰和偏航时天线扫描稳定,在窄和中等扫描时均以游标为中心。俯仰1行。
(18)在扩展和不扩展比例时,天线定位在游标范围的俯仰角上。通过FCC保持游标在指定点上方来跟踪游标所指地面上的指定点。
(19)天线俯仰倾斜角由火控计算机自动计算,并通过多路总线送至雷达。此角可围绕计算值通过油门杆手柄上的俯仰控制来进行手动调整。
(五)多普勒波束锐化
(1)从扩展真实波束地图方式进人,由手柄控制器上的“返回搜索”按钮来选择此模式;当设定控制在“AUTO”时,也可由FCC来选择。
(2)方位和俯仰均为笔形波束。
(3)方位角大于±15°至最大值±60°时,采用8:1波束锐化。
(4)无运动补偿。
(5)前端STC∝R^-4(20E,11nmile; 10E, 9nmile)。
(6)手动射频增益控制,由NAGC固定中频增益。
(7)块大小:20nmile量程时,在20nmile范围内为5mile x 5mile;10n mile量程时,在10nmile范围内为2.5mile×2.5mile,位置可通过游标调整。
(8)PPI显示方式,偏航稳定。
(9)X-Y游标固定在显示中心。当游标固定在显示中心时,游标移动控制光标下的地图移动。
(10)天线扫描的横滚、俯仰和偏航均以游标为中心稳定。扫描宽度计算为游标距离的函数。俯仰1行。
(11)视频对数压缩(幅度4bit)。
(12)乡纵横比1:1显示240个门,同时可选择冻结模式。
(13)天线俯仰倾斜角由FCC自动计算,并可在计算值附近进行手动调整。
(14)1PRF=1.84x VA/C xsinΨ(每次观察时间更新;脉冲积累数=18)。
(15)当距离×sinΨ>非扩展距离值的一半时,多次观察数=4次方位观察。
(16)通过FCC保持游标在指定地点上方来跟踪游标指定地点。游标位置的更选用于导航数据刷新。
(六)信标
(1)手动选择此模式工作;当设定控制为“AUTO”时,通过FCC选择进人。
(2)询问频率9.375+0.0075GHz,应答频率9.310±0.006GHz。
(3)前端STC(15nmile)∝R^-3。
(4)在窄和中等天线扫描状态中,天线扫描以游标为中心在横滚、俯仰和偏航上稳定。俯仰1行扫描。
(5)通过FCC定位X-Y游标位置。
(6)俯仰扫描一一由FCC自动定位,并可围绕此点手动调节。通过FCC保持游标在指定地点上方来跟踪游标指定地点。
(7)利用油门杆控制器上的“返回搜索”按钮来选择扩展模式。
(8)编码脉冲回答——飞行员解码回答。
(9)手动射频增益控制。
(10)PPI 地图方式显示,偏航稳定。
(11)火控雷达无信标延时补偿。
(七)对海模式
(1)有相参和非相参两种子模式,仅通过火控雷达选择。
①海1
●非相参脉冲模式,与真实波束地图(RBM)工作方式基本相同。
●用于低海情杂波去除。
●脉间频率捷变,10个捷变频率。
●10/20/40/80nmile 显示范围。
●256个距离门。
●手动接收机射频增益控制。
●中频增益控制由NAGC(数字自动增益控制)决定。
●前端STC;STC距离为目标距离值的函数。
●10nmile量程为B型显示;20~80nmile为PPI显示。
●具有零速度目标探测能力。
●在所有距离上可扩展PPI显示。
②海2
●低重复频率MTI方式。杂波预先对消方式同下视模式一样。
●用于高海情杂波去除。
●前端STC;STC距离为目标距离值的函数,且∝R^-4。
●显示方式同海1模式。
●128个距离门射频信号,中频增益控制同海1模式。
●扩展比例为4:1。
●无目标历程(RCA独立)。
(2)在窄和中等天线扫描状态中,天线扫描以游标为中心在横滚、俯仰和偏航上稳定。俯仰1行扫描。
(3)通过FCC定位X-Y游标位置。
(4)扩展距离比例可选择。
(八)冻结方式
(1)用于真实波束地图、DBS、海面杂波和信标模式
(2)由雷达控制面板(RCP)控制进人和退出。
(3)检测到冻结命令后立即冻结当时的探测画面。
(4)扩展和非扩展画面均可冻结。
(5)游标位置由操作员控制;在扩展和非扩展模式中,游标相对于显示的固定地图移动。
(6)雷达发射机高压(HV)仍然打开,但去掉了射频激励,输出峰值功率至少减少80dB。.
(7)冻结时,相对于十字准线的地面距离和航向将连续显示在FCNP上。
(8)显示有一个飞机位置符号;在冻结模式中,符号位置由FCC计算并不断更新。
(九)空地测距
仅由FCC命令控制模式进出。
(1)提供沿雷达天线视线到地面点的斜距。
(2)通过FCC给出天线位置命令。
(3)位置命令更新由飞行员调整压在指定目标上的HUD标线位置,通过油门杆手柄控制器完成。
(4)10nmile 距离范围。
(5)脉间频率捷变
阶段1:利用无偏移的接收机波束发射8个IPP,每个频率都不同;PRF=2kHz,脉冲宽度=0.5μs(最后的两个IPP被丢弃)。此阶段的D.C.校正由第一个IPP完成。
阶段2:3个IPP的“UP”波瓣,每个频率都不同;3个IPP的“DOWN”波瓣,频率如同上一个“UP”波瓣的IPP频率一样(头两个“UP”波瓣的IPP被丢弃;后两个“DOWN”波瓣的IPP被丢弃。Δ=UP-DOWN,形成256个Δ)。PRF=1kHz,脉冲宽度=0.5μs。
阶段3:除了脉冲宽度=0.286μs外,其他均同阶段2;与获得Δ值不同的是,形成了128个“UP”和128个“DOWN”样本。
阶段4:利用无偏移的接收机波束发射9个IPP,每个频率都不同。PRF=2.2508kHz,脉冲宽度=0.286μs。,发射机不发射。此阶段只用于D.C.校正。
(6)前端STC∝R^-3,STC距离=4nmile。
(7)由STC进行射频衰减。
(8)分为两个探测截获阶段:
①利用256个距离门、0.5μs脉冲的搜索来探测地面块;
②只利用256个距离门、0.5μs脉冲的Δ值进行横滚探测。
(9)稳定状态时用“截获/跟踪”方法,即在两个探测截获阶段后,利用通常的128个被处理距离门、0.286μs脉冲的Δ/∑方法进行,之后按顺序重复。
(10)原始距离值平滑后进行滤波/预测,再按20ms周期间隔提供给FCC。
六、雷达软件功能
对于新型的机载PD火控雷达来说,软件在系统中起着重要的作用。加载在ANAPG-66雷达中的软件,完成了执行系统工作方式和功能时必不可少的处理任务,提供对系统硬件的全面控制。下面对该雷达软件执行的基本功能进行了一般性的描述,更详细的描述在计算机程序开发说明或软件需求说明中进行交代。
(1)执行功能
完成计算机中的软件功能模块执行前的初始化和控制。
(2)I0处理功能
对于外接使用及来自外部数据源(FCC、INU、SMS、REO、驾驶杆辅助控制器或油门杆手柄)的数据进行必要的逻辑控制和格式处理;为外部设备提供格式化的雷达数据;检测备份工作方式并相应变动输人数据。
(3)模式确定和控制功能
确定需要软件执行的主要工作模式和子模式。
(4)雷达发射机控制功能
对发射机进行控制,并检测发射机的故障关机条件。
(5)雷达天线控制功能
①产生天线扫描图形:计算天线视线单元矢量。
②天线稳定性和控制:计算天线伺服指令、万向节限位信号和目标部分矢量。
③天线监视:为天线方位扫描中心提供目标坐标。
④天线万向节角度误差:计算提供给卡尔曼跟踪器使用的万向节角度误差(PA和PE)。
5天线指向修正:提供在飞机机动过程中由于雷达罩曲线外形改变及飞机机身弯曲引人的方位和俯仰角度误差修正。
(6)雷达低功率射频单元控制功能
①LPRF控制:控制4个参考振荡器之一正常工作,控制频率捷变,控制信标处理,指定VCXO控制的缩放比例,控制A/D采样的时序和饱和度,控制微处理器程序流程。
②RF控制:控制STC、CAGC、TAGC和信标方式时的手动接收机增益控制。
③IF控制:控制NAGC、IFGAIN和手动接收机增益控制。
④LPRF校正:启动LPRF微处理器校正序列(FRQCAL、XMTCAL、RPCAL和DCCAL)。
(7)雷达数字信号处理控制功能
①DSP控制:为DSP工作模式、时序(PRF、距离门大小、驻留时间)、滤波器消隐、相关器、LORO顺序、跟踪矩阵定位和需要处理的距离区域
②主波束杂波预测:计算主波束杂波速度。
③VCXO控制和校正:利用主波束杂波速度去计算VCXO控制信号,校准VCXO。
④DSP显示控制:控制扫描变换、X-Y游标发生器和符号发生器。
(8)雷达显示控制功能
以雷达工作模式信息的形式控制雷达/EO的显示(REO),包括截获游标距离和方位、天线方位和俯仰位置。
(9)空/空搜索功能
①目标预处理:去除距离门跨越。
②角度质心处理:用角度信息标记候选目标。对候选目标的几次驻留信息进行相关以形成目标,并用距离和角度信息标记这些目标。
③目标存储和报告:对多达64个目标的角度、距离和目标历程信息进行存储处理。此存储表为“帧历史”提供显示数据(通过DSP完成),并为目标截获提供了初始空间数据。
(10)空/空目标截获功能
①目标截获:提供在目标搜索和跟踪之间转换所需要的判断逻辑(即目标选择)。
②确认最佳PRF:为寻找PRF提供处理,此PRF能使目标速度更靠近32号滤波器(频率离杂波凹口最远)。
③初始距离质心:为卡尔曼跟踪滤波器计算初始距离。
(11)空/空跟踪功能
①检测后积累(PDI):为增加信噪比,进行两次驻留后的PDI,以去除由于天线扫描造成的方位和俯仰误差对距离调制的影响,并形成目标强度、目标邻近范围噪声电平的估计值。
②跟踪角误差计算:利用RF角度误差和伺服指向误差数据来为卡尔曼跟踪器计算方位和俯仰角度残差。
③距离质心:为卡尔曼跟踪器计算质心的模糊和不模糊距离以及距离误差。
④卡尔曼跟踪器:估计相关的目标/拦截位置、目标距离变化率和整个的目标加速度。
⑤多普勒跟踪器:计算和跟踪不模糊的目标多普勒频率。
⑥跟踪性能监测和校正:提供跟踪数据的校正,以防止由于低信噪比、干扰信号或万向节限制期间造成的无效数据致使卡尔曼跟踪器性能恶化。
⑦万向节角度变化率:产生天线方位和俯仰角速率(利用输出到FCC的跟踪数据和机体速率信息)。
(12)空空导弹功能
为AIM-9L导弹导引头产生导弹指向信号。检查辅助跟踪系统的有效性,检查雷达和导弹导引头视向的一致性
(13)空/地功能
①真实波束地图(RBM):在RBM时提供系统控制。
②多普勒波束锐化:在RBM时提供系统控制。
③空地测距:在AGR时提供系统控制,并计算雷达沿FCC给定的天线视向相对于指定的非离散目标的距离和距离变化率。
④信标:在信标状态提供系统控制。
⑤海1:在海1状态提供系统控制。
⑥海2:在海2状态提供系统控制。
⑦冻结:在冻结状态提供系统控制。
(14)自测试/机内自检测(BIT)功能
①自测试:为自测试提供系统控制和处理。
②BIT:为BIT提供系统控制和处理。
(15)电子反对抗措施(ECCM)功能
为ECCM功能提供系统控制和处理。
(16)CMP控制功能
通过控制和监测面板提供对计算机存储位置的存取,用于自动测试目的。
