
论文解读 | 物体姿态和形状估计使用有符号距离字段的RGB-D中的对象
原创 | 文 BFT机器人

01 背景

本篇论文的研究背景是机器人应用中对物体姿态和形状估计的需求。
在自主导航、抓取和操作等领域,机器人需要对环境中的物体进行准确的姿态和形状估计,以实现有效的交互和任务执行。然而,由于实际应用中存在遮挡、光照变化、噪声等问题,这一任务变得非常具有挑战性。
遮挡是一个常见的问题,当物体被其他物体或障碍物遮挡时,机器人无法完整地观测到物体的表面信息,导致姿态和形状的估计困难。
光照变化也会对姿态和形状估计造成影响。不同的光照条件会改变物体表面的光线反射情况,进而干扰传感器数据的解释和分析。
此外,噪声也是一个挑战,传感器可能受到各种噪声源的干扰,例如传感器本身的噪声、环境噪声以及传感器与物体之间的干扰,这些噪声会降低姿态和形状估计的准确性。
因此,本文提出了一种基于RGB-D图像的物体姿态和形状估计方法,以解决这些挑战。该方法利用RGB-D图像的颜色和深度信息,结合先进的算法和模型,实现对物体姿态和形状的准确估计。通过实验验证,该方法在准确性和效率方面表现出优越性,并展示了其在机器人应用中的潜在应用。
02 该篇论文的创新点
1. 提出了一种基于有符号距离场的生成形状模型,用于快速分析合成优化。
2. 引入了一个新的初始化网络,可以从单个或多个视角估计物体的6D姿态和形状。
3. 使用可微分渲染器将生成形状模型与RGB-D图像进行比较,从而实现对物体姿态和形状的估计。
03 算法步骤
本篇论文的算法主要包括以下几个步骤:
1. 数据预处理:从RGB-D图像中提取物体的2D边界框和深度图。
2. 初始化网络:使用一个初始化网络,从单个或多个视角估计物体的6D姿态和形状。该网络由两个分支组成,一个用于姿态估计,另一个用于形状估计。其中,姿态估计分支使用卷积神经网络(CNN)提取特征,并输出物体的旋转矩阵和平移向量;形状估计分支使用类似的方法提取特征,并输出物体的有符号距离场(SDF)。
3. 生成形状模型:基于有符号距离场的生成形状模型,用于快速分析合成优化。具体来说,将SDF转换为三维网格模型,并使用Marching Cubes算法生成表面网格模型。
4. 可微分渲染器:使用可微分渲染器将生成形状模型与RGB-D图像进行比较,从而实现对物体姿态和形状的估计。具体来说,将表面网格模型投影到深度图上,并根据深度误差计算损失函数。然后使用反向传播算法更新姿态和形状参数,以最小化损失函数。
5. 迭代优化:通过优化算法对姿态和形状进行迭代优化,以提高估计结果的准确性。具体来说,使用随机梯度下降(SGD)算法更新网络参数,并使用Adam优化器调整学习率。
6. 输出结果:最终输出物体的6D姿态和形状。 (图1)

图1 SDFEst算法流程
04 实验
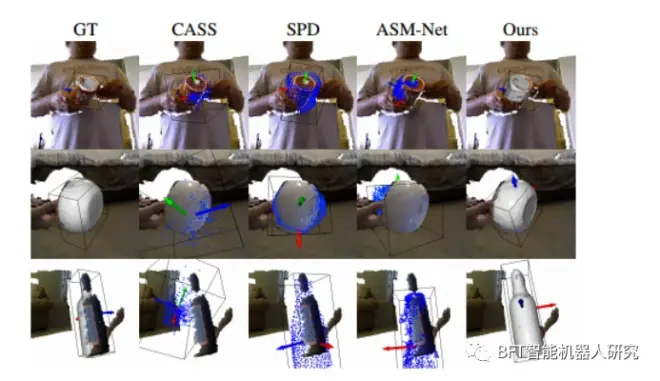
图2
图2展示了SDFEst算法在单视图姿态和形状估计方面的定性结果。
每个子图的左侧是输入的RGB图像,右侧是SDFEst算法估计得到的3D模型。红色框表示真实的姿态和形状,绿色框表示SDFEst算法估计的姿态和形状。
从图中可以观察到,SDFEst算法能够准确地估计物体的姿态和形状,并且能够处理多种复杂情况。例如,算法能够处理不同种类的物体,包括具有不同尺度和形状的物体。此外,算法还能够处理物体在不同姿态下的变化,并且能够应对物体之间的遮挡现象。
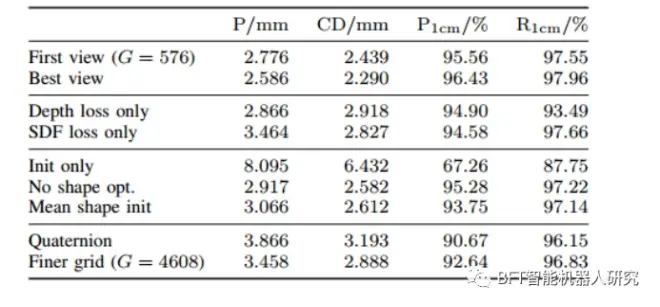
表1
表1总结了SDFEst算法在三视图实验设置下的消融研究结果。消融研究是为了验证SDFEst算法中不同组件的有效性。
表格中的第一行是基准结果,即使用随机第一个视图进行初始化的结果。第二行是使用最佳视图进行初始化的结果,即根据方向分布选择概率最高的视图作为初始视图。可以看出,使用最佳视图进行初始化可以进一步提高算法的性能。
表格中的第三行和第四行分别是去除SDF和去除姿态估计组件后的结果。可以看出,去除SDF组件会显著降低算法性能,而去除姿态估计组件则会略微降低算法性能。
总之,表1展示了SDFEst算法中不同组件对算法性能的影响,并且验证了这些组件在算法中的有效性。
05 总结
本篇论文介绍了一种名为SDFEst的计算机视觉算法,它旨在从单个视图中准确估计物体的完整形状。
该算法采用了模块化架构,并受到人类感知的启发。通过实验验证,SDFEst算法在多视图设置下展现出了很好的性能,并通过消融研究验证了其各个组件的有效性。总之,该论文提供了关于如何从人类感知中学习并改进计算机视觉算法在物体形状估计方面性能的见解。
标题:Categorical Pose and Shape Estimation of Objects from RGB-D using Signed Distance Fields
更多精彩内容请关注公众号:BFT机器人
本文为原创文章,版权归BFT机器人所有,如需转载请与我们联系。若您对该文章内容有任何疑问,请与我们联系,将及时回应。
