
有鹿机器人创始人&CEO 陈俊波:AGI时代下的机器人技术机遇与挑战
2023-07-25 14:24 作者:Siyuejiang | 我要投稿


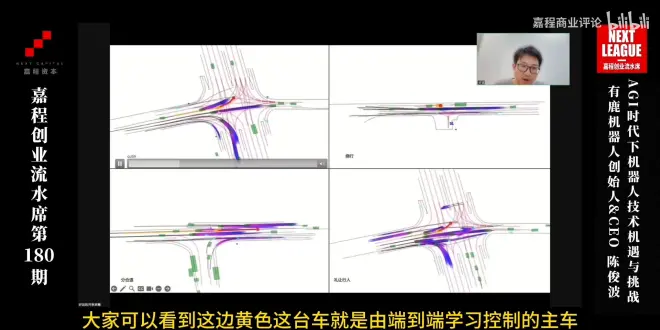
绿色是机器人state,底盘、机械臂的位置
80%成功率不够
清晰简单

输入图片,world encoder,embedding

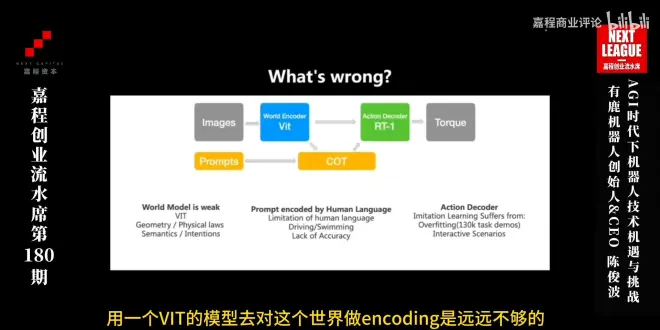
为啥是COT,理论上不同embedding联合训练
imitation learning只能解决静态场景问题,why?RT-1端到端transformer架构设置导致的?

端到端,data-driven

自动驾驶!
routing是全局规划路径或者目标点
传统自动驾驶的问题:少量人工标记数据上学习;future world decoder有大量不可学习部分,需要工程师翻译

数据量不够的时候CNN表现好于transformer




2021年OpenAI解散机器人团队的原因:几十个机器人在实验室收集数据;机器人产品模式,针对客户问题生成不同产品,成千上万的出货

革命性产品过2个月就会推出

参数、全局注意力都不是关键。dynamic/static是关键







人工标注作为feedback,imitation leanring 没发在交互场景工作

imitation learning的局限
一算loss就平均了

distribution drift
当前zhen的输出是下一zhen的输入
误差累积
交互性
车端低算力平台跑起来
1B左右模型是可以在车端跑的
做端到端的必要有多大?

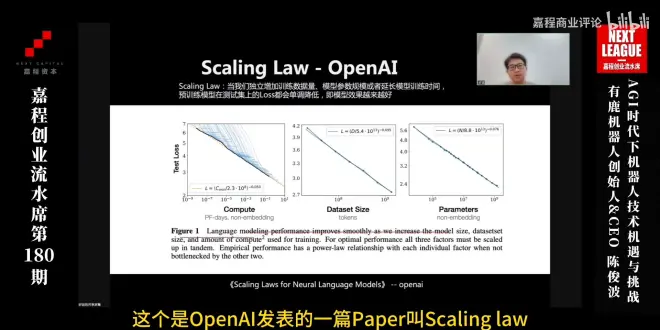
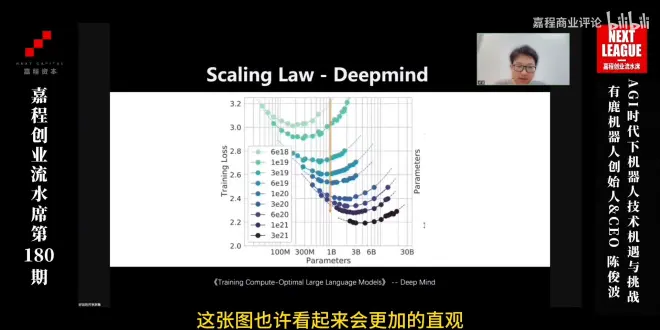
算力、数据集、参数 scaling law
real time inference一定在车端
自车低速复杂场景,周围车高速。。。先落地
如何看待无地图:融合地图,offline地图更稳定,online方式,对长程地图描述不会那么准确,有底图,有online mapping过程,offline灵活性不够,不一致会以online为准
多低成本实现offline底图
