
如何用S函数实现积分运算
在对多自由度机器人臂进行控制时,关节的行程和行程速度从多体模块是可以直接导出的,在常规PD控制中,只需要针对上面两个控制量给定目标值,然后做闭环控制就可以了。S-Function可以很好地执行该算法。但如果要把PD做成PID该如何利用S-Function进行运算?
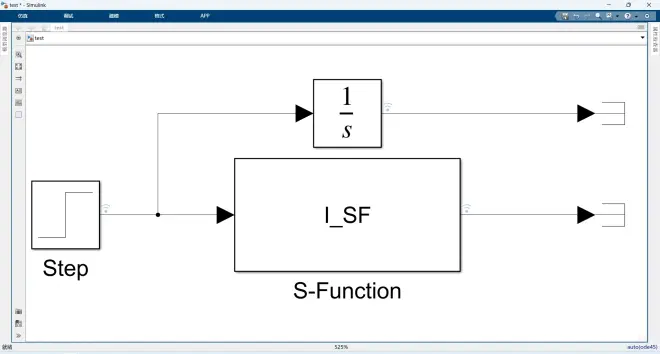
在已知初始状态的情况下,确实是可以使用S-Function进行积分运算的。比如:

S-Function代码:
function [sys,x0,str,ts] = spacemodel(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes;
case 1,
sys=mdlDerivatives(t,x,u);
case 3,
sys=mdlOutputs(t,x,u);
case {2,4,9}
sys=[];
otherwise
error(['Unhandled flag = ',num2str(flag)]);
end
function [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 1;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 1;
sizes.NumInputs = 1;
sizes.DirFeedthrough = 0;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 = [0];
str = [];
ts = [0 0];
function sys=mdlDerivatives(t,x,u)
e1 = u(1);
sys = e1;
function sys=mdlOutputs(t,x,u)
ie1 = x(1);
sys = ie1 ;
原理很明显,就是将e1的积分赋值状态量x,由于用到了mdlDerivatives,需要给定初始状态x0,仿真结果如下:


结论:如果这个方法帮到了你,我感到很高兴。如果需要转载此文章,请尊重我的劳动成果,注明出处。如果你有更好的方法,请告诉我让我也学习一下,谢谢。
