
使用VScode搭建ROS开发环境过程记录

接上回,现在我已经在ubuntu16.04安装完了ros-kinetic,但现在ros代码的编写修改以及编译运行都是在终端进行,无法自动补全代码以及函数跳转,很不方便。因此,我选择VScode作为ros项目代码的编辑软件,下面是我下载安装并配置VScode用来编写运行ROS项目的过程。

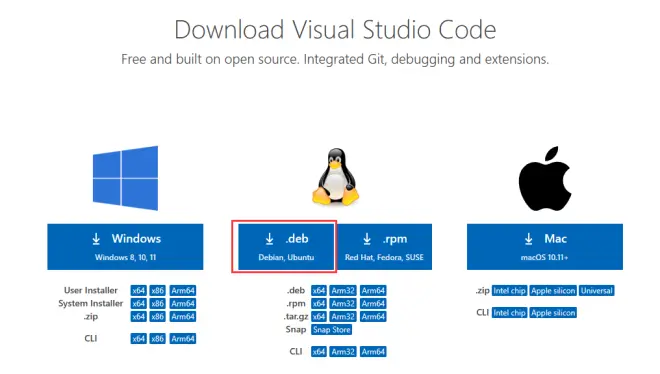
1、下载安装VScode
去VScode官网下载对应版本安装文件
https://code.visualstudio.com/download
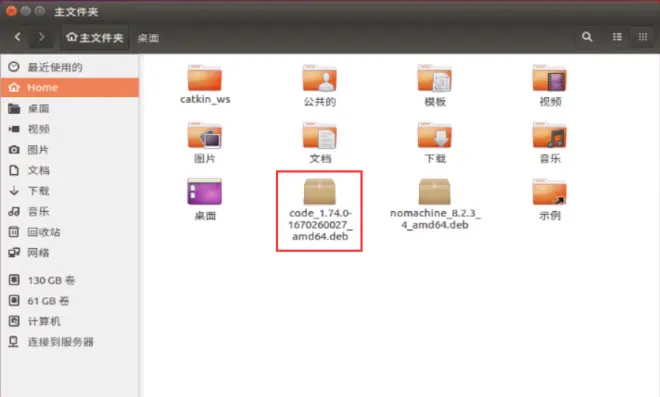
将下载的文件放在/home文件夹下
打开终端,输入
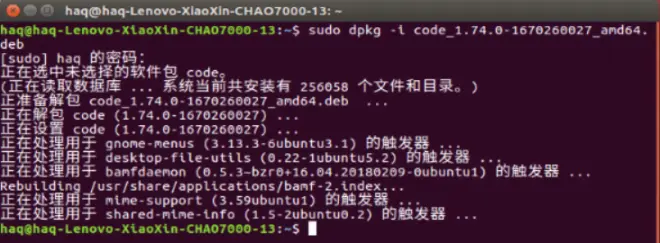
VScode安装完成。
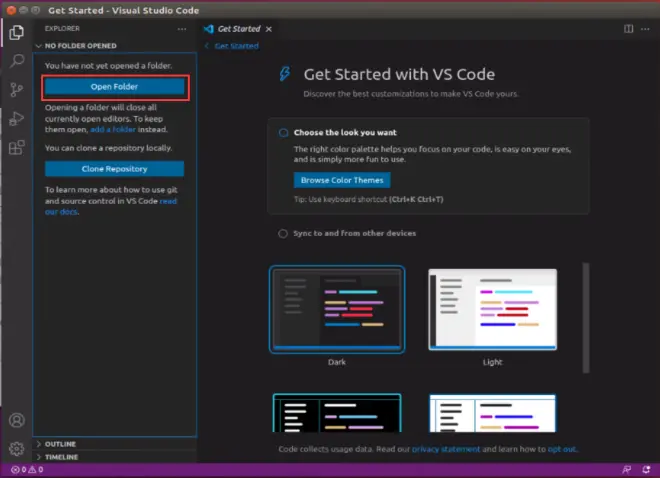
2、打开并配置VScode
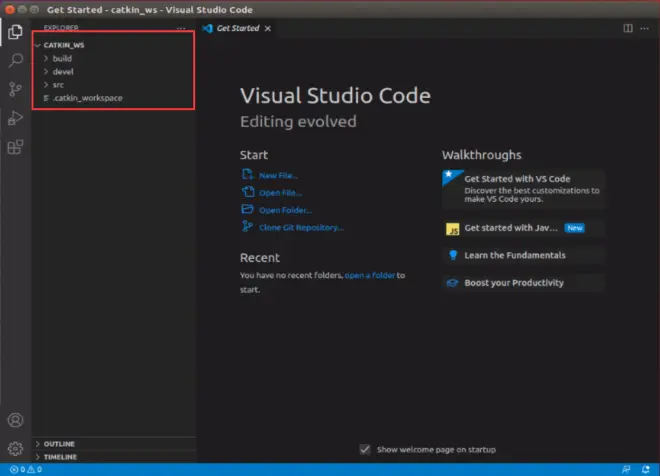
在之前创建的工作空间catkin_ws中打开终端,输入code打开VScode

打开工作空间的文件夹
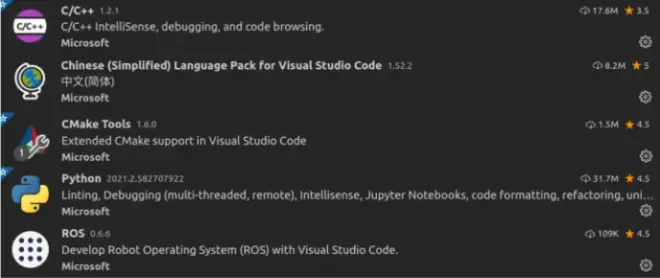
安装一些常用插件
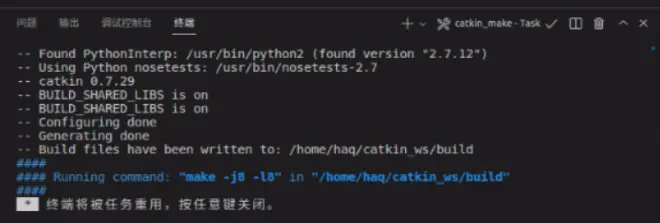
按下快捷键ctrl+shift+B调用编译,选择catkin_make:build右侧齿轮,编辑tasks.json文件,将文件内容替换如下:
保存后再次按下快捷键ctrl+shift+B开始编译
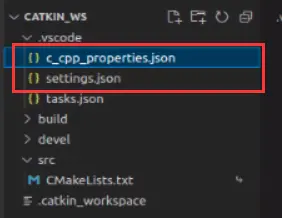
编译后.vscode文件夹中会产生:1)c_cpp_properties.json【与C/C++运行头文件、库文件配置有关】2)settings.json【与python解释器有关】
将c_cpp_properties.json内容替换为
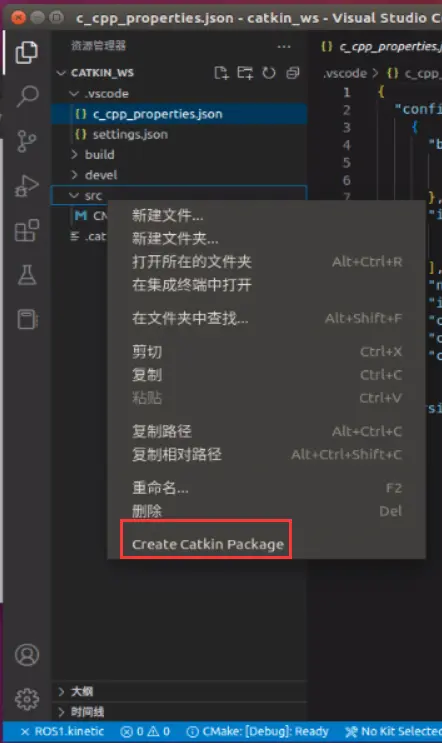
3、VScode中创建功能包并测试
首先,右键点击src选择Create Catkin Package,在弹出的第一个框中填写要创建的包名称(package name),这里我定义为hello,按Enter确认后,在弹出的第二个框中填写包依赖(dependencies),本实验中添加roscpp rospy 和 std_msgs.

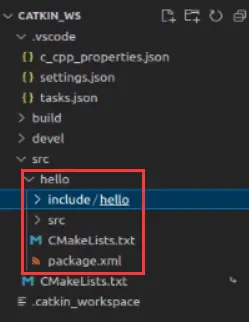
新的功能包创建完成
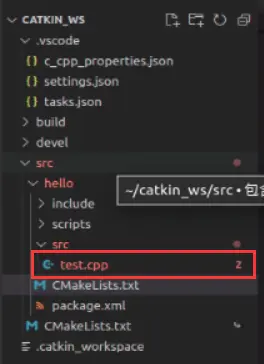
在src文件夹下创建test.cpp,写入如下代码:
修改hello文件夹下的CMakeLists.txt文件:
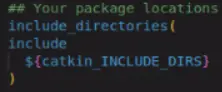

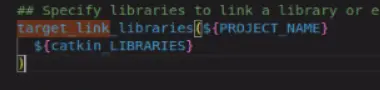
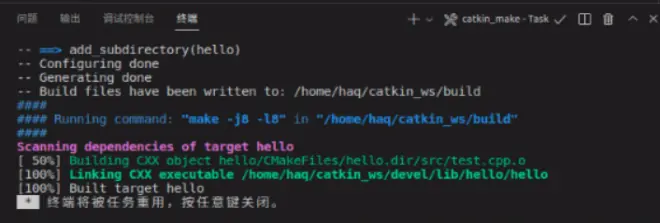
主要修改以上三处,保存后按下快捷键ctrl+shift+B开始编译。
在命令行下运行以下命令,设置工作空间自动刷新环境
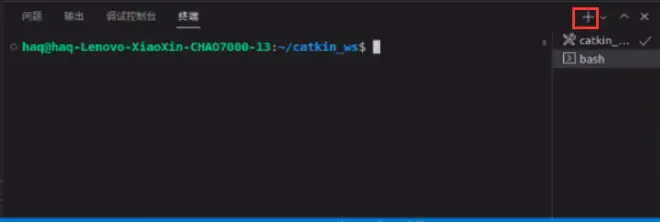
点击+新建终端,终端在vscode中被打开,便于多终端操作。
在新终端中输入
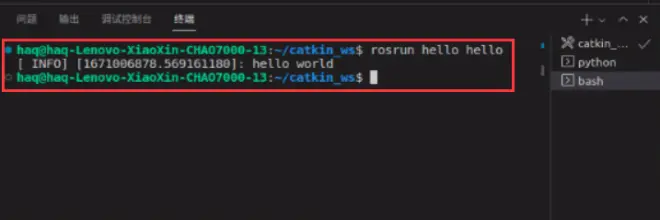
再打开一个新终端,输入
输入过程中按Tab键会自动补全命令,运行结果如下则测试成功。
接下来测试python脚本,在工作空间下的/hello/scripts文件夹下新建test.py文件
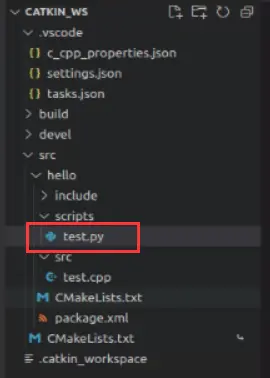
在test.py文件中输入
保存test.py文件后,打开新的终端,进入scripts文件夹下给test.py添加执行权限,输入:

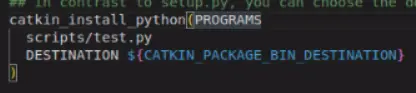
修改/hello文件夹下的CMakeLists.txt文件,仅有一处修改:
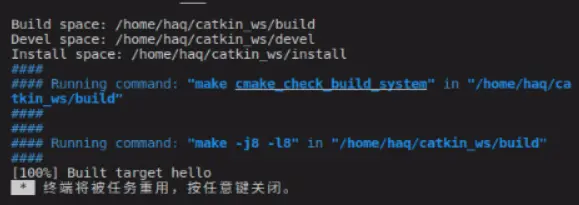
保存后按下快捷键ctrl+shift+B开始编译。
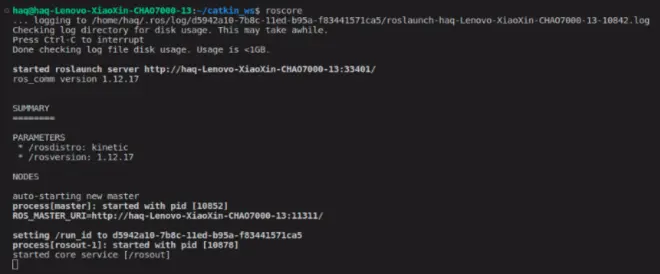
打开新的终端,输入roscore
打开另一个新终端,输入

运行成功。
至此,VScode配置完成。

参考教程:
[1]VSCODE + ROS 配置方法https://blog.csdn.net/g944468183/article/details/123759886
[2]VScode搭建ros环境https://blog.csdn.net/FRIGIDWINTER/article/details/121972137
[3]ROS运行python脚本https://blog.csdn.net/qq_45779334/article/details/108943681
