
《ROS机器人编程》第三章_搭建ROS开发环境
更新!整理出《ROS机器人编程》第三章ppt讲义版,请对照书籍P22-39页学习,配套视频教学文档可在YouTube上查看。
相关视频链接以及更多详细资料可以在消息页面留言联系小编哟。
听课不停学,每周二,周五更新,欢迎追更!


【说明】本书使用的ROS应用程序开发环境如下。
硬件:使用INTEL及AMD芯片的台式机及笔记本电脑
操作系统:Ubuntu 16.04.x Xenial Xerus或Linux Mint 18.x
ROS:Kinetic Kame
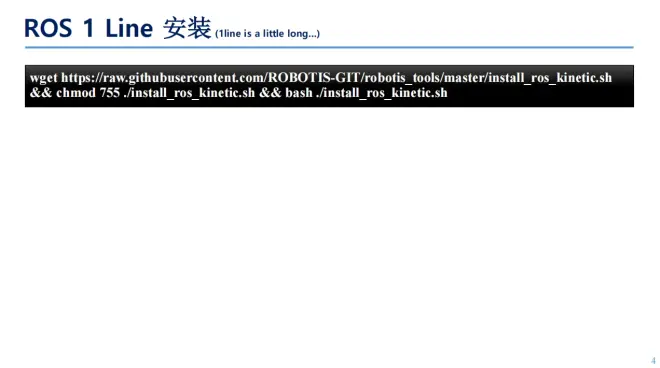

【说明】如果用户的Ubuntu版本是16.04.x或Linux Mint 18.x,那么可以使用下面准备好的一个脚本来简化ROS安装
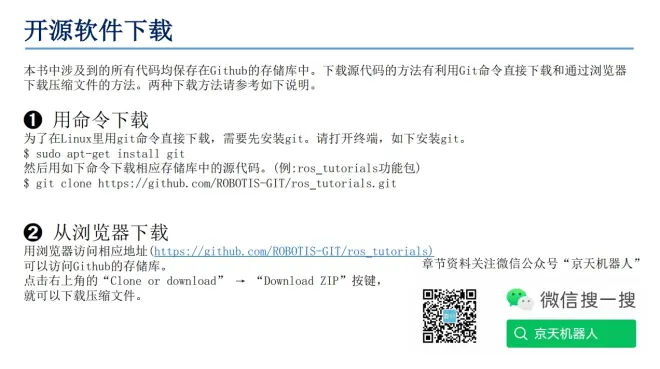
$wget https://raw.githubusercontent.com/ROBOTIS-GIT/robotis_tools/master/install_ros_kinetic.sh
$ chmod 755 ./install_ros_kinetic.sh
$ bash ./install_ros_kinetic.sh
【说明】测试安装结果
所有ROS安装已完成。要测试它是否正确安装,请关闭所有终端窗口并运行一个新的 终端窗口。现在通过输入以下命令来运行roscore。
$ roscore如果运行之后像下面没有出现错误,则说明成功安装。退出是[Ctrl+c]。
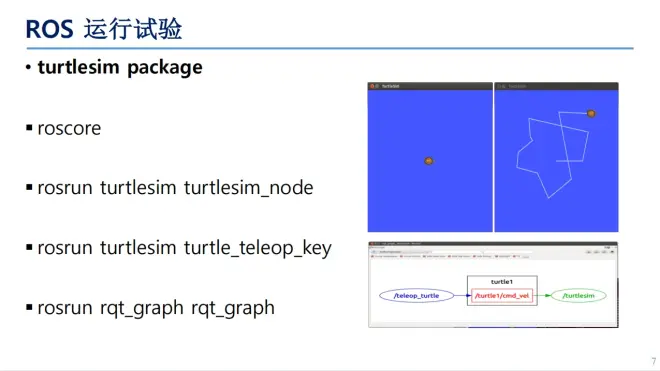
【说明】如果用户已经安装了ROS,下面测试它看看是否正常工作。下面的例子是用ROS提供的turtlesim功能包(节点组合)在屏幕上显示ROS的图标-乌龟,并可以用键盘操纵它的 一个节点(程序)。
在本文中,许多ROS特定的术语,如节点、功能包和roscore将在第4章的ROS术语中详细介绍。让我们先确保ROS安装没有问题吧。
如果您按下该终端窗口上的方向键(←,→,↑,↓),您将看到乌龟按照上图右侧所示的方向键移动。您必须在终端窗口中输入键盘。这看似只是一个简单的仿真,但实体机器人也可以通过这种方式进行远程控制。
在终端窗口中按[Ctrl+c]终止所有被执行的roscore和节点。作为参考,[Ctrl+c]用于强制终止Linux/Unix中的程序。








欢迎点击关注京天机器人专营店https://item.jd.com/10055225794502.html#crumb-wrap
原创声明:本篇文档为原创文档。欢迎转发转载,请注明出处。
本书中使用的开源代码会根据读者使用的时间,可能会有版本变化,因此在运行时可能会有相异的结果。
本次文稿编辑在原版上增加了开源软件列表,开源硬件列表,开源资源以及相关社区等链接,希望大家在学习ppt的同时可以参考原版书籍配合电脑实战,会更有帮助。
微信搜一搜:京天机器人。获取更多章节ppt讲义
