
三轴XYZ平台绘制空心字
1. 功能说明
本文示例将实现R312三轴XYZ平台绘制“机器时代”空心字的功能。

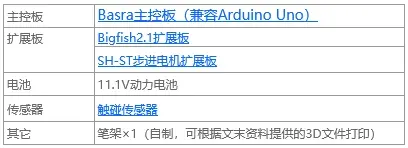
2. 电子硬件
在这个示例中,采用了以下硬件,请大家参考:
3. 功能实现
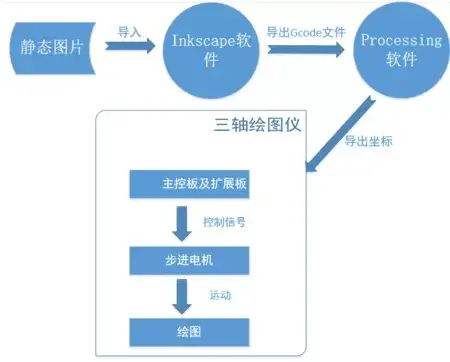
在这里我们采用了一种算法,该算法的思路是:先建立一个平面坐标系,将我们所需要画的图形放置在该坐标系中,这样就可以确定该图形每个顶点的坐标,两个相邻的顶点之间确定一条直线,直线上各点坐标通过插补计算得到,然后画笔依次沿着这些坐标进行移动,完成绘制。所以在这个过程中,我们需要知道如何建立一个图形的坐标系,以及什么是插补计算。插补计算方法可参考 【R311】双轴XY平台-绘制斜向多边形 。
建立坐标系:
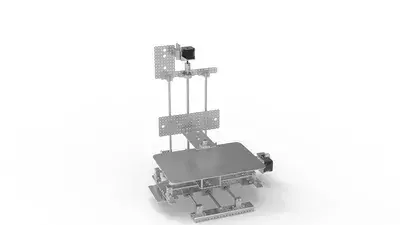
三轴XYZ平台绘图仪,即通过X, Y, Z三轴的步进电机协调控制绘图笔来进行图形的绘制。通过上位机(PC)来发送gcode代码;下位机(三轴XYZ平台绘图仪)通过对接收到的gcode坐标代码进行解析,并通过插补算法来控制各个轴的步进电机进行图形绘制。
本实验将基于三轴XYZ平台利用processing软件处理gcode文件后,进行绘制文字“机器时代”。
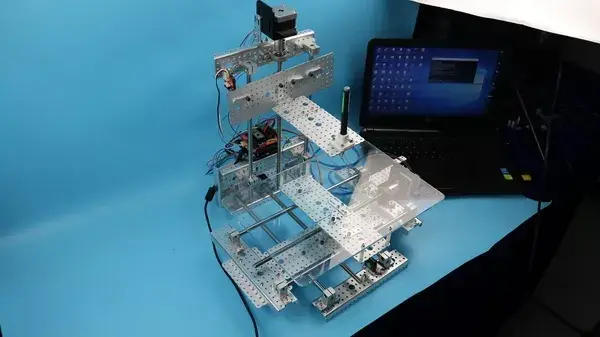
3.1硬件连接
① 各轴步进电机与SH-ST步进电机扩展板的接线顺序如下(从上至下):
X:红蓝黑绿
Y:红蓝黑绿
Z:黑绿红蓝

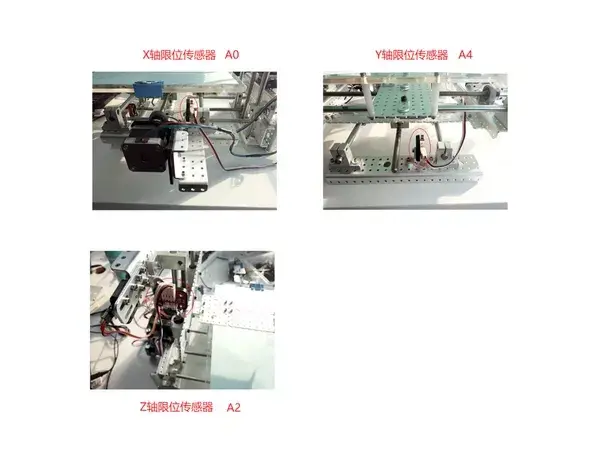
② 各个轴的限位传感器(触碰)与Bigfish扩展板的接线如下:
X:A0
Y:A4
Z:A2
3.2 示例程序
编程环境:Arduino 1.8.19
将参考例程代码(_4_smile.ino)下载到主控板中,烧录完成后打开电源,三轴XYZ平台绘图仪各轴步进电机将进行复位,复位完成后,绘图笔将到达绘图区域中心,本实验中三轴XYZ平台绘图仪绘图面积为80*80mm。
3.3 图形绘制
接下来我们将通过上位机的processing软件发送生成文字“机器时代”的 gcode文件给三轴XYZ平台绘图仪进行图形绘制。
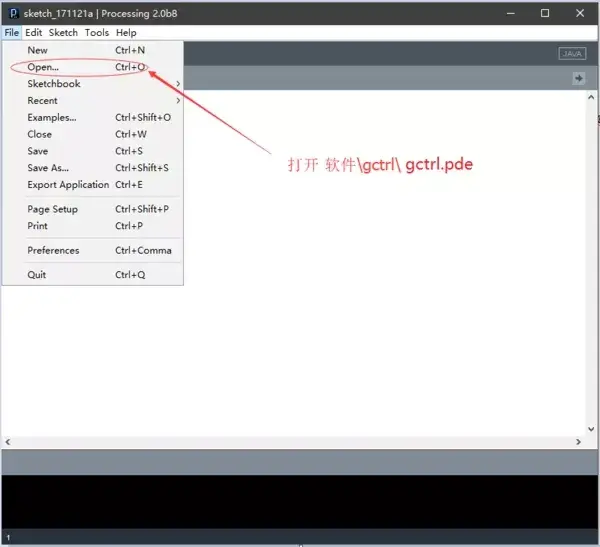
首先将 软件资料包\processing-2.0b8.zip 文件解压到电脑上任意磁盘,然后打开processing.exe来启动 Processing 软件,之后按下图所示步骤进行操作:
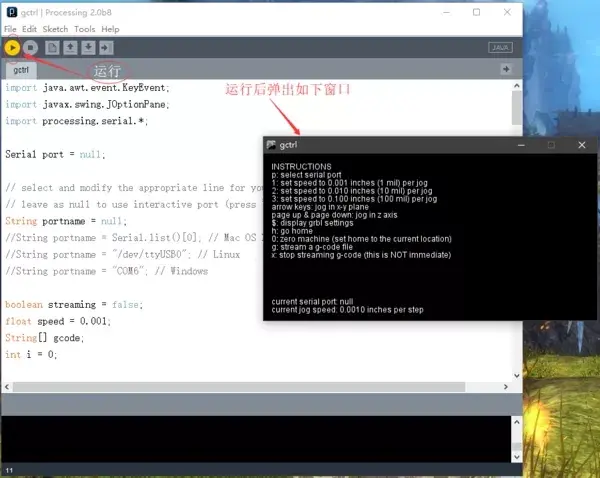
此时打开绘图仪电源开关,在英文输入法状态下按键盘P键,选择端口号,等待三轴XYZ平台绘图仪复位完毕,进入接收上位机指令状态;然后英文输入法状态下按键盘G键,选择之前生成的 gcode文件,点击确定,开始发送gcode文件代码,三轴XYZ平台绘图仪开始绘图;三轴XYZ平台绘图仪在绘图过程中,可以按X键来停止发送gcode文件代码。
注意事项:
① 关于绘图笔的安装,可以让绘图仪进入工作状态后关闭电源,此时安装绘图笔使其与纸面相接即可。
② 程序中步进电机使用的细分数为16细分,无细分时200步/圈,16细分即 3200步/圈。
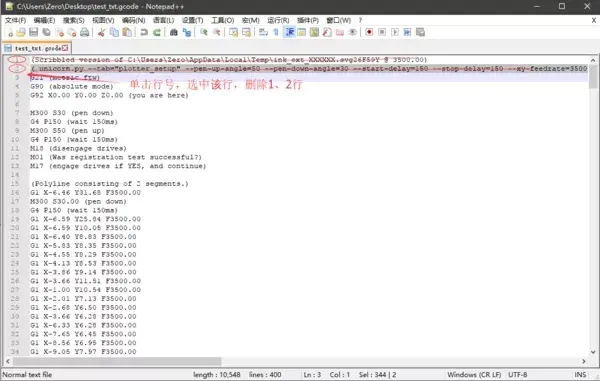
③ 生成gcode坐标文件后,使用windows的笔记本或者Notepad++软件打开gcode文件,然后删除第一行和第二行,如下图所示:
4. 资料下载
资料内容:
①绘制空心字-例程源代码
②绘制空心字-样机3D文件
③软件资料包
资料下载地址:https://www.robotway.com/h-col-202.html
想了解更多机器人开源项目资料请关注 机器谱网站 https://www.robotway.com
