
3D点云中高效的多分辨率平面分割方法
论文链接:https://www.researchgate.net/profile/Sven-Behnke-2/publication/221104985_Efficient_Multi-resolution_Plane_Segmentation_of_3D_Point_Clouds/links/0912f5012c7339e394000000/Efficient-Multi-resolution-Plane-Segmentation-of-3D-Point-Clouds.pdf
来源:公众号「3D视觉工坊」
摘要
本文提出了一种有效的多分辨率方法将 3D 点云分割成平面组件。为了提高效率,本文从粗到精的 3D 分辨率中迭代处理大点云,在每个分辨率下,快速提取表面法线来描述表面元素(面元),将无法与来自较粗分辨率的平面关联的面元分组为具有霍夫变换的共面簇。然后提取这些集群上的连接组件,并通过 RANSAC 确定最佳平面拟合。最后,合并平面片段并在最佳分辨率上细化分割。在实验中,展示了该方法的效率和质量,并将其与其他最先进的方法进行了比较。
简介
我们将 Hough 变换与 RANSAC 相结合以稳健地提取来自 3D 点云的平面片段(图 1)。为了提高效率,我们采用由粗到细的策略:以多种分辨率提取局部表面法线来描述表面元素(面元)。我们使用八叉树实现了一种高效的多分辨率法线方法估计。在每个分辨率下,我们确定哪些面元可以用较粗分辨率上拟合的平面来解释。在剩余的面元上,我们应用霍夫变换将场景预分割为共面面元。为了提高准确性和鲁棒性,我们使用 RANSAC 拟合平面段。在最佳分辨率下,我们合并共面连接的平面段并分配剩余的点。
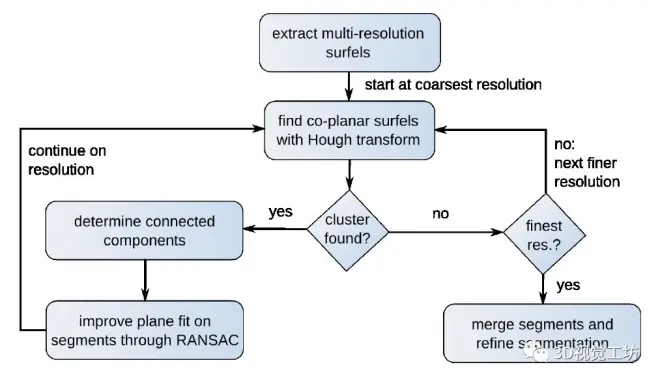
图1
1、通过多种分辨率进行有效的法线估计
我们用八叉树表示点云。八叉树由分支节点和叶节点组成,每个分支节点和叶节点都覆盖一个 3D 体积。树的根跨越感兴趣的完整 3D 体积。每个分支节点在其中心位置将其体积分成八个大小相等的立方体(称为八分圆)。对于它的每个八分圆,该节点都包含一个子节点,该子节点本身是一个分支节点,或者是树中的一片叶子。八叉树可以用于以与树的不同深度中节点的体积大小相对应的采样分辨率采样点云。对于采样深度 d,我们确定采样深度的所有节点或较粗分辨率的所有叶节点。此外,八叉树允许有效地计算 节点体积中的积分值:在每个节点中,我们维护位于节点体积内的点值的积分。在树的构建过程中,我们将一个点的值分配给该点访问的所有节点,同时将它从根递归传递到它的最终叶节点。利用这个属性,我们可以有效的计算每个节点中点的均值和协方差。均值:μ;协方差:

一旦构建了八叉树,我们就可以通过找到样本协方差的最小特征值 λ 的特征向量来估计每个分辨率上的表面法线。图 2 展示了本方法在两个分辨率上提取的法线示例。
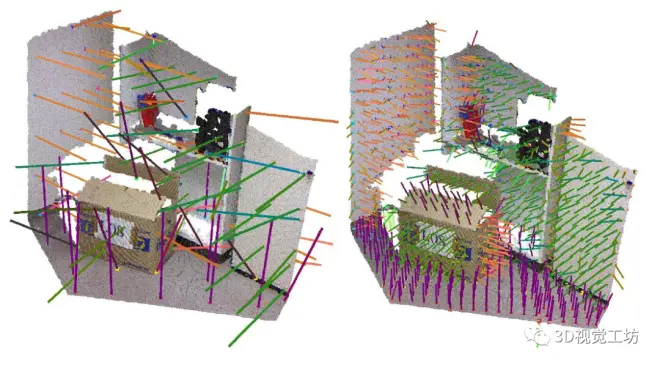
图2我们需要用最少数量的点来支持法线估计。通过考虑协方差矩阵的特征值进一步评估法线的质量。当点主要分布在一个平面内时, 曲率:γλλλλ (1)很小;当点在平面的两侧均匀分布时,λλ的比值接近于1。对这些指标进行阈值化会影响平面边界的法线估计,最终,我们要求最大特征值 λ 相对于节点的体积长度而言较大,以便这些点完全分布在整个体积中。
2、霍夫空间的预分割
我们使用 Hough 变换在单一分辨率上找到共面面元簇,使用快速的两阶段方法。在第一阶段,每个面元在方向直方图中为具有相应法线的平面投票。按照 Rabbani 的方法,我们将方向直方图离散化为近似等距的倾斜角和方位角。公式(1)中的曲率方程提供了法线估计中不确定性的度量。我们使用此曲率将面元 和权重 的的法线方向分布到直方图中具有相似方向的范围中,比如:

其中,是面元中点数的个数,γ是法线曲率的阈值, 和 分别是面元和直方图的法线, 特别的,α是法线的角度影响范围。我们检测局部最大值方向直方图,以便找到平行面元的簇。在第二阶段,我们从平行面元簇中确定共面面元。每个面元投票决定平面到坐标系原点(例如,视点)的距离。与方向直方图类似,我们将选票分配到具有线性衰减的相邻箱中。我们在距离直方图的最大值处再次找到共面面元簇。图 3 显示了示例场景中此预分割步骤的结果。为了使这个过程高效,我们保持直方图的粗分辨率,并将模型参数的准确估计推迟到后期处理阶段。然而,距离直方图的分辨率随着面元的分辨率而增加。
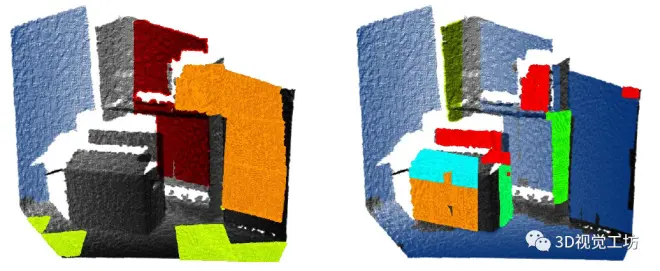
图3
3、分割成连通域
霍夫变换不考虑面元的空间连通性。因此,我们从共面元组中提取连通分量。图 4 举例说明了这一点。我们在对应于面元的霍夫空间最大值的平面上覆盖一个网格。网格的分辨率是根据面元的分辨率来选择的。我们将每个面元位置投射到网格中并标记占用的网格单元。区域增长产生连接的组件,当组件不受最小数量的面元(在我们的实现中设置为 3)支持时,我们将丢弃这些组件。
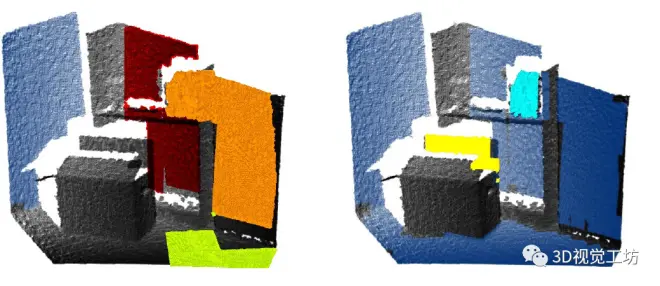
图4
4、通过 RANSAC 进行精确分割
我们进一步改进了与共面面元的连接组件的平面拟合。由于方向和距离直方图的粗分辨率,霍夫变换的平面估计只是对真实底层平面的粗略估计。因此,我们将 RANSAC 直接应用于面元表示的点。图 5 显示了异常值检测的示例。
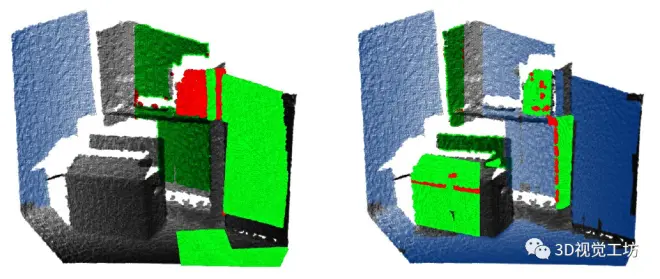
图5RANSAC 从一组随机的三点样本中估计平面参数。在固定的迭代次数内,我们确定面元的所有点支持的最好的平面估计。当点到平面的距离低于某个阈值时,点被接受为平面拟合的内点。我们根据面元的分辨率调整此阈值。我们只接受大部分面元点支持的平面拟合。我们还要求提取的平面与霍夫变换确定的初始拟合相似。当平面拟合被接受时,我们重新确定线段的连通分量。
5、由粗到细的分割
在前面的部分中,我们详细介绍了如何在单一分辨率上分割平面。然而,我们建议使用由粗到细的策略来分割场景。通过这种方式,可以仅从几个面元中有效地检测到大平面段。此外,我们的方法固有地适应场景中平面的范围。它使用尽可能多的上下文来决定共面性。我们从粗分辨率到精细分辨率处理场景。当在分辨率上找不到更多的平面段时,我们过渡到下一个更精细的分辨率。为了改进已经找到的平面片段的分割,我们将更精细分辨率的面元重新分配到片段上。我们测试面元方向和位置是否适合每个平面段,以及它是否位于其连接组件的边界内或边界处。最终,我们还调整了连接的组件。为此,我们根据新的分辨率增加了占用图的采样率。我们将面元投影到平面段中并标记相应的单元格被占用。但是,我们保留了前几层的较粗略的占用决策。请注意,虽然平面段可能会在此过程中扩展,但不会合并一起增长的段。我们在最后的处理步骤中合并共面连接的段。
6、后处理
在处理完所有分辨率后,我们改进了最精细分辨率的分割。首先,我们合并连接的共面平面段。然后我们在不使用法线信息的情况下将节点分布到平面段上。对于每个节点,我们确定一个平面段候选列表,这些候选平面段与节点体积内的点的均值距离很小。此外,节点需要落在连接的组件内或每个候选节点的边界。我们进一步检查无法唯一分配给平面段的节点,并单独分布节点体积中的点。我们根据距离选择最好的两个候选平面 和 ,计算通过 和 的交线与法线方向的等距平面:

当平面段的重心位于该平面的不同侧时,我们相应地将点分布在等距平面的两侧。否则,我们只是将这些点关联到最近的平面。
实验结果
30 幅 ABW 测试图像的分辨率为 512× 512 像素。该数据集还结合评估工具提供了地面实况分割。表 1 显示了我们的方法在 SegComp ABW 测试图像上的结果,对于与地面实况的重叠具有 80% 的容忍度。
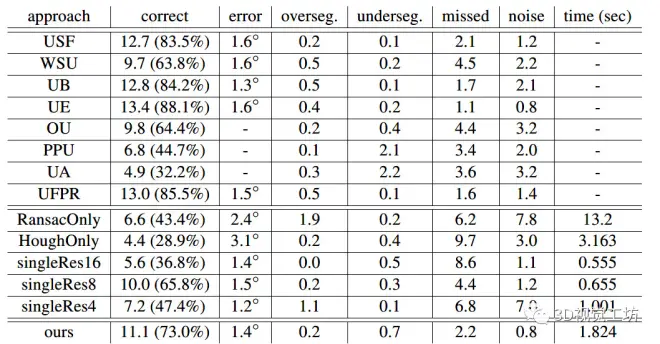
表1虽然我们的方法不是专门为深度图像设计的,但其分割质量和平面拟合精度位于该数据集结果的上限范围内。请注意,最好的分割结果是通过利用图像结构中编码的连接信息的方法获得的。这也将这些方法限制在处理单视图深度图像。此外,距离图像包含深度离散化效应形式的强系统噪声,这对于仅由少数点组成的小片段很难处理。为了评估我们算法各个阶段的贡献,我们对几个变体进行了测试。RansacOnly 方法使用贪心法来检测平面(使用点云库 PCL 实现)。它在不使用法线信息的情况下迭代地找到适合尚未归因的点的最佳支持平面。它只能达到平均性能,其运行时间在很大程度上取决于场景的复杂性。HoughOnly 基于我们的多分辨率方法,但不执行 RANSAC 来改进初始 Hough 分割。且与我们的方法相比,HoughOnly 方法分割场景的准确性较低。图 6展示了我们的方法在不同重叠公差 SegComp ABW 测试图像上的结果。可以看出,我们的方法中的错误在很大程度上是由于缺少平面段造成的。对于高噪声,某些点可能未分配给平面或边界可能无法正确解析。由于我们的方法不考虑图像邻域,因此很难达到 90% 的重叠。图 5展示了 ABW 数据集的两个示例性分割。在左图中,我们的算法遗漏了多个平面片段。我们将一些未命中归因于八叉树的离散化。这个问题可以通过在不同的离散化中重新处理未分段的部分来解决。
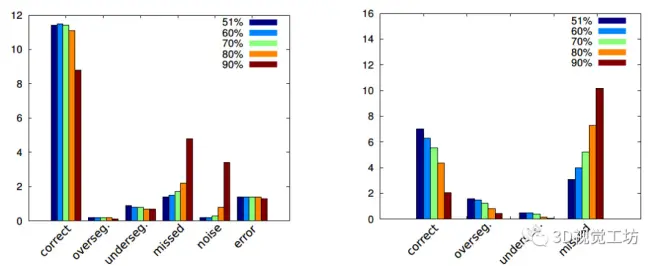
图6
总结与展望
本文,我们提出了一种从 3D 点云中提取平面的有效方法。我们将 Hough 变换与RANSAC 相结合,以在多种分辨率下拟合平面。通过使用由粗到精的策略,我们可以有效地利用可用数据。它允许考虑最大可能的上下文来做出共面性的决定。这也使我们的方法数据高效。在实验中,将改方法与使用 SegComp 数据库的最先进方法进行了比较。实验结果表明,我们以高帧率和高质量处理 3D 激光和深度传感器(例如 Kinect)的 3D 点云。在未来的工作中,我们将提取更多类型的几何形状图元,例如圆柱体和球体。我们还计划调整我们的方法来顺序处理来自 Kinect 等高帧率传感器的深度图像。
本文仅做学术分享,如有侵权,请联系删文。
3D视觉工坊精品课程官网:3dcver.com
1.面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)
2.彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进
3.国内首个面向工业级实战的点云处理课程
4.激光-视觉-IMU-GPS融合SLAM算法梳理和代码讲解
5.彻底搞懂视觉-惯性SLAM:基于VINS-Fusion正式开课啦
6.彻底搞懂基于LOAM框架的3D激光SLAM: 源码剖析到算法优化
7.彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM +LIO-SAM)
8.从零搭建一套结构光3D重建系统[理论+源码+实践]
9.单目深度估计方法:算法梳理与代码实现
10.自动驾驶中的深度学习模型部署实战
11.相机模型与标定(单目+双目+鱼眼)
12.重磅!四旋翼飞行器:算法与实战
13.ROS2从入门到精通:理论与实战
14.国内首个3D缺陷检测教程:理论、源码与实战
15.基于Open3D的点云处理入门与实战教程
16.透彻理解视觉ORB-SLAM3:理论基础+代码解析+算法改进
17.不断更新中......
重磅!粉丝学习交流群已成立
交流群主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、ORB-SLAM系列源码交流、深度估计、TOF、求职交流等方向。
添加小助理微信(dddvisiona),一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。
